 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Нагревание и охлаждение
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 [ 86 ] 87 88 89 90 91 92
Рис. 5-58. Скоростная /г = /(У)или механическая п = \ (Af) характеристика двигателя с параллельным возбуждением.
Зависимость n = f(I) при /в = С0П8( и
f/ = const называется скоростной характеристикой (рис. 5-58). Ток 1=1а + 1в мало отличается от тока /о, так как /в составляет небольшую долю от /н.
Зависимость n=f{ gt;M) при /в = = const и = const называется механической характеристикой (рнс. 5-58). Она отличается от скоростной практически только масштабом по оси абсцисс. Сплошная кривая на рис. 5-58 представляет собой обычную характеристику. Она показывает, что скорость вращения с увеличением нагрузки на валу падает.
Обратимся к формуле (5-59) для скорости п. Из нее видим, что при увеличении тока уменьшается числитель U-IaZr, при этом будет также уменьшаться знаменатель Ф вследствие реакции якоря. Обычно числитель уменьшается больше, чем знаменатель. Поэтому скорость вращения при увеличении / (или М) будет падать. Если же в двигателе создается сильная реакция якоря, что приводит к большому уменьшению потока Ф, то скорость вращения с увеличением нагрузки будет не падать, а возрастать, например согласно пунктирной кривой на рис. 5-58. Двигатель с такой характеристикой для работы в обычных условиях практики непригоден, так как он будет работать неустойчиво (рис. .5-56,6).
Показанный на рис. 5-58 ток /о есть ток двигателя при холостом ходе (при отсутствии нагрузки на валу).
Двигатели с параллельным возбуждением являются лучшими из регулируемых электродвигателей. Они позволяют плавно и экономично регулировать скорость вращения.
На рис. 5-59 приведены рабочие характеристики двигателя с параллель-
ным возбуждением: М, п, I, ц=[{Р2) при f/= const и /в = const (т) -к. п. д., Рг - мощность на валу).
Формула (6-59) показывает, что для изменения п достаточно изменять поток Ф. Изменение потока достигается путем изменения тока возбуждения при помощи регулировочного реостата Rp (рис, 5-57). Так как ток возбун-дения составляет небольшую долю номинального тока якоря, то при указанном способе регулирования скорости вращения потери в регулировочном реостате незначительны.
При увеличении тока вЬзбуждення скорость вращения падает, при уменьшении тока возбуждения она возрастает.
При уменьшении /в поток становится меньше. Так как при этом скорость вращения в первый промежуток времени остается почти поствянной вследствие инерции вращающихся частей, то уменьшается э. д. с. Еа. Уменьшение Еа приводит согласи (5-56) к увеличению тока якоря /о, причем даже небольшое уменьшение Еа дает относительно большое увеличение тока /а, так как значения U а Еа мало отличаются одно от другого.
В качестве примера рассмотрим работу двигателя прн {; = 110 в, д= 105 в, г = 0,08 ом и токе якоря
и - Е
110-105
0.08
= 62,5 а.
Если магнитный поток Ф уменьшить путем уменьшения тока во.збуждення на 5/о, то э. д. с. д в первый промежуток времени, когда скорость еще не успела возрасти будет равна приблизительно 100 в, а ток якоря
No- 100
0,08
125 а,
т. е. прн уменьшении Ф на 5% ток возрастает приблизительно на ЮОу raquo;.
1 | |
i h | |
Рис 5-59. Рабочие .характеристики двигателя с параллельным возбуждением.
Обращаясь к формуле (6-49), мы устанавливаем, что момент М, развиваемый двигателем, повышается, потому что 1а увеличивается больше, чем уменьшается Ф. Увеличение М приводит к увеличению скорости вращения. При ее увеличении будет возрастать э. д. с. Еа, следовательно, будут уменьшаться /а и М. Режим устанавливается при более высокой скорости вращения, при которой момент двигателя М будет равен моменту нагрузки Мст.
Применяя аналогичные рассуждения, можно доказать, что при увеличении тока возбуждения скорость вращения будет падать.
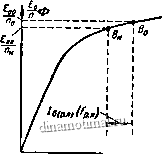
Рассмотрим, как производится определение скоростной характеристики п = f {!) и механической характеристики n = f{M\ Оно может быть произведено при помощи кривой ц/п = = /(/д), полученной из характеристики холостого хода, снятой опытным путем или найденной путем расчета. Эта кривая представлена иа рис. 5-60. При других масштабах иа осях координат она представляет собой зависимость Е 1 п
Ф=!(Р, так как
- /УФ = сф.
п 60 а Будем считать, что известны величины прн номинальной нагрузке: (/ = / - ),
в.и. в(р.я) р.я (в (р.я)-ток возбуждения, соответствующий размагничивающей н, с. реакции якоря F) Тогда определение скорости вращения п при холостом ходе произвб-дится следующим образом
Сначала находим э. д. с. якоря при номинальной нагрузке = У -/д н- затем - э. д. с. якоря при холостом ходе Е, = и- - laor, причем для двигателей, имеющих ток холостого хода /о-н можно приближенно принять g(,Cj. Далее по кривой рис. 5-60
находим для /в. = ОА:
и,для /в. -(р.я1=0Л :
Из.равеистй (5-61) и (5-62) получаем: Е
. о =
(5-61)
(5-62)
. (5-63)
Очевидно, что
, т, е. отношению
.4. Фо
потоков при нагрузке Ф и при холостом ходе Ф,.
О 1в
Рис. 5т60. К определению скоростной характеристики.
Если известна скорость вращения при холостом ходе, то скорость вращения прн нагрузке равна:
н А В
. (5-64)
Промежуточные значения скорости вращения при /я lt;/а найдем, определив Е и /gip.a) для тока /д.
Зная /д и п, найдем вращающий момент:
А} = 0,102.60 = / [кГ-м] (5-65)
и, следовательно, можем построить механическую характеристику n=f{M). Как отмеча- лось, для устойчивой работы двигателя необходимо, чтобы По было больше Пв.
Если двигатель с параллельным возбуждением предназначается для широких пределов регулирования скорости вращения (например, 4:1) путем изменения тока возбуждения, то при ослабленном поле реакция якоря может оказаться слишком сильной (работа будет протекать на начальной части кривой рис. 5-60) и мы можем получить АоВо1ЛвВв gt;
gt; ао/ ая и Пи gt;По СОГЛЗСНО (5-64).
Тогда необходимо для уменьшении относительного значения реакции якоря (величины /в(р.я) в.н) выполнить двигатель с увеличенным воздушным зазором б. Такие двигатели стоят дороже, чем нормальные двигатели с пределами регулирования скорости вращения примерно 1 : 1,5.
Регулировать скорость вращения двигателя можно также путем изменения напряжения U на зажимах якоря, что следует из формулы (5-59). Изменение и может быть достигнуто при помощи реостата, включенного в цепь якоря. Такой способ регулирования скорости вращения неэкономичен, так как он приводит к непроизводительной затрате большой энергии в реостате. Действительно, при уменьшении laquo;, laquo;а-
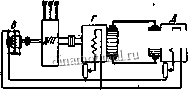
Рнс. 5-61. Система генератор-двигатель.
пример, на 50%, если при этом ток в якоре остается неизменным, мы должны уменьшить и почти на 50% и, следовательно, почти половину мощности поглотить в реостате. Реостат при этом получается громоздким и дорогим, так как рассчитывается на длительную нагрузку большим током.
в) Система laquo;генератор-двигатель raquo;. Иногда в специальных случаях применяют отдельный генератор для питания двигателя, скорость вращения которого нужно регулировать в широких пределах. Получается так называемая система laquo;генератор - двигатель raquo;. Соответствующая схема показана на рис. 5-61. Здесь ДПТ - двигатель переменного тока (обычно асинхронный); Г - генератор постоянного тока независимого возбуждения, получающий ток возбуждения от небольшого генератора с параллельным возбуждением В; Д - регулируемый двигатель и РМ - рабочий механизм (например, прокатный стан). Регулирование скорости вращения двигателя получается достаточно экономичным, так как здесь изменение напряжения U па зажимах двигателя достигается путем изменения относительно небольшого тока в обмотке возбуждения генератора. В схеме не требуется также пусковой реостат, так как пуск производится при пониженном напряжении, которое в дальнейшем постепенно повышается.
Здесь же легко осуществляется реверсирование двигателя (изменение направления вращения), если это требуется. В этом случае изменяют направ-Рис. 5-62. ление тока в обмотке воз-Двигатель с буждения генератора при тельньГвоз- помощи переключателя (не бужденнем. показанного на рис. 5-61).
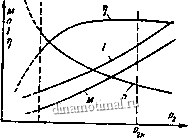
Рис. 5-63. Рабочие .характеристики двигателя с последовательным возбуждением.
г) Двигатель с последовательным возбуждением. Схемз двигателя с последовательным возбуждением приведена на рис. 5-62. Здесь ток возбуждения равен току якоря. Вследствие этого при малых насыщениях, когда можно считать Ф = /а, вращающий момент двигателя пропорционален квадрату тока [см! (5-49)]. При больших значениях тока, когда стальные участки магнитной цепи насыщаются, момент двигателя почти пропорционален току.
С увеличением нагрузки при увеличении, следовательно, тока возрастает магнитный поток, что приводит согласно (5-59) к снижению скорости вращения. При холостом ходе и при малых нагрузках на валу ток двигателя имеет небольшое значение. Небольшое значение будет иметь и магнитный поток. Следовательно, скорость вращения согласно (5-59) при этом сильно возрастает. Она будет превышать допустимое значение в отношении механической прочности вращающихся частей машины. Поэтому нельзя допускать работу двигателя с последовательным возбуждением при холостом ходе и при малых нагрузках. Обычно для нормальных двигателей нагрузка не должна быть меньше 25-30% номинальной. Лишь малые двигатели (мощностью на десятки ватт) допускают работу при холостом ходе, так как их собственные потери достаточно велики.
На рис. 5-63 представлены рабочие чарактеристики двигателя с последовательным возбуждением. Пунктирные части характеристик относятся к тем нагрузкам, при которых не может быть допущена работа двигателя
Встречается название laquo;сериесный двигатель raquo;.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 [ 86 ] 87 88 89 90 91 92 |




