 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Нагревание и охлаждение
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 [ 88 ] 89 90 91 92 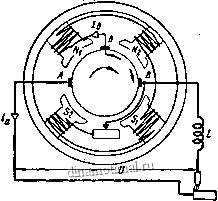
Рис. 5-71. Сварочный генератор завода .Электрик*.
Рассмотренные униполярные машины, позволяющие получить постоянный ток без коллектора, называются также бесколлекториыми машинами постоянного тока. Но хотя они и не имеют явновыраженного коллектора, все же здесь получается в скрытом виде коммутация, т. е. переключение проводников, на которые мы можем мысленно подразделить вращающийся диск или циливдр.
Попытки построить бесколлекторные машины постоянного тока с об.моткой на якоре и без переключения ее витков не приводили и не могут привести к положительным результатам, так как невозможно создать такие условия, при которых величина (измейе-
ние во времени потокосцепления) какой-либо катушки имела бы постоянный знак в течение длительного времени.
б) Сварочный генератор сдвой-ной полюсной системой. Рассматриваемая машина иначе называется сварочным генератором с laquo;расщепленными raquo; полюсами. В Советском Союзе машины такого типа выпускаются заводом laquo;Электрик raquo;. Одна из них схематически представлена на рис. 5-71. Здесь мы имеем двойную полюсную систему N1-N2 и Si-Si, причем полисы Hi и. Si слабо насыщены, а полюсы Ni и Sa сильно насыщены (их сердечники имеют сравнительно небольшое сечение). Обмотка возбуждения присоединена к главной щетке В и к вспомогательной щетке Ь, помещенной между главными щетками А н В. находящимися на гео.метри-ческой нейтрали.
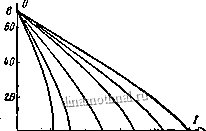
а 8 amp; 160 гйо 320
Рис. 5-72. Внешние характеристики генератора.
сварочного
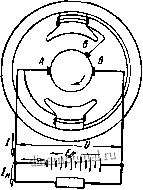
Рнс. 5-73.-Трехщеточнын генератор.
При нагрузке, когда в якорной обмотке будет иметь месо ток 1а создается поперечная реакция якоря, которая будет размагничивать полюс (набегающую половину двойного полюса Al-N2) и подмагничивать полюс Лг (сбегающую половину двойного полюса Л,-Л/г). То же будем иметь для двойного полюса Si-S2. Так как полюсы N\ и Si слабо насыщены, то их потоки сильно уменьшатся, потоки же полюсов N2 и S останутся почти без изменения, так как эти полюсы имеют сильное насыщение. В результате получим большое уменьшение напряжения U ча щет ках А-В. Напряжение 11 ча щетках b-В почти не изменяется, так как оно зависит от потоков полюсов N2 и S2.
Внешние характеристики сварочного генератора показаны на рис. 5-72. Они достаточно благоприятны для целей электрической сварки. Установка наибольшего тока (тока короткого замыкания) достигается при помощи реостата в цепи возбуждения, показанного на рис. 5-7Ь Реактивная катушка L в цепи якоря служит для сглаживания тока при его резких колебаниях.
в) Трех щеточный генератоп. В трехщеточных генераторах обмотка возбуждения присоединяется к одной из главных щеток и к третьей (вспомогательной) щетке, ui-To , - очетьно главной примерно на 120 (рис. 5-73). Такие генераторы мощностью
о.; (./ 1)имеаяются в качестве источ-
ников тока на автомобилях. Они должны работать с нагрузкой, так как в противном случае при большой скорости вращения их напряжение и может чрезмерно возрасти. Постоян ное напряжение U здесь может быть получено только при параллельной работе с аккумуляторной батареей. При этом ток генератора / остается почти постоянным при изменении скорости вращения в широких пределах (пвимер-но 6:1).
Напряжение между щетками А и Ь, подведенное к обмотке возбуждения будет в основном определяться потоком набегающей половины полюса, а этот поток прн увеличении тока якоря будет уменьшаться из-за поперечной реакции якоря. Следовательно будет уменьшаться ток возбуждения, что ограничивает увеличение тока якоря.
На рис. 5-74 приведены характеристики генератора, которые показывают, что в преде-
Рнс. 5-74. Характеристики трехщеточного генератора.
лах изменения скорости от п\ до laquo;2 генератор отдает ток /н нагрузке (например, лампам накаливания) и ток /-/ аккумуляторной батареи. При скорости вращения, меньшей щ, генератор автоматически отключается при помощи специального реле и снова включается прн помощи того же реле, когда скорость будет больше По. При скорости, превышающей ni, генератор также отключается и начинает работать без нагрузки, что, как отмечалось, может привести к чрезмерному возрастанию напряжения и. Чтобы этого не было, в цепь обмотки возбуждения включается плавкий предохранитель, разрывающий эту цепь при возрастании тока возбуждения сверх допустимого.
Рассмотренный трехщеточный генератор в последнее время заменяется обычным генератором, постоянство напряжения .которого поддерживается при помощи вибрационного регулятора, что создает лучшие условия для работы аккумуляторной батареи.
г) Электромашинные уснлнте-л и. В последние годы в автоматических устройствах, наряду с усилителями - электронными, тиратронными, магнитными, гидравлическими- находят себе все более широкое применение электромашинные усилители, позволяющие получить на выходе большие мощ-HOCtHnpn незначительной мощности управления
Обыкновенный генератор с независимым возбуждением ,может рассматриваться как усилитель. В этом случае мы должны считать мощность, подведенную к обмотке возбуждения, за laquo;входную raquo; Рвх (или мощностью управления), а мощность на зажимах якоря - за
laquo;выходную raquo; Рвых.
Отношение Рвых1Рв% = ку называется коэффициентом усиления. Для нормальных машин небольшой мощности (0,5-30 квт) Ау= 15-7-50, т. е. в таких машинах мы получаем laquo;усиление raquo; мощности в 15-50 раз (конечно, за счет мощности первичного двигателя, которым дол gt;({ен приводиться во вращение всякий электромашинный усилитель).
Можно при помощи двух генераторов независимого возбуждения получить двухступенчатый усилитель (рис. 5-75). Здесь общий коэффициент усиления будет равен произведению коэффициентов усиления отдельных машин ky = kyk y. Он будет, следовательно, значительно больше, чем в предыдущем случае; для нормальных машин при мощности на выходе порядка 30 квт fey= 1 000-ь I 200.
Рассмотренные усилители во многих слу-чаЯх малопригодны для автоматических устройств. Основным их недостатком является большая laquo;инерционность raquo; цепей возбужде-
Рис. l-7о. Двухступенчатый усиЛйтель, полученный нз двух генераторов независимого воз-
буждення ( ky= -р-
ь - ь -
у - Р * у -
Р \ -Ь ь --\
- Ку Ку - р
вх J
ния, имеющих большие индуктивности. Следовательно, здесь мы не будем и-меть быстро-отзывчивой реакции на изменение входной мощности Рвх, что обычно требуется от усилителей. Кроме того, даже двухступенчатый усилитель, состоящий нз двух обыкновенных генераторов, имеет недостаточный коэффициент усиления, особенно при малой мощности генераторов.
Отмеченные недостатки в значительно меньшей степени проявляются в электромашинном усилителе поперечно-10 поля, называемом сокращенно ЭМУ поперечного поля. Схема соединения его обмоток показана на рнс. 5-76.
ЭМУ поперечного поля представляет собой коллекторную машину постоянного тока (обычно двухполюсную). Ее якорь не отличается от якоря нормальной машины, статор выполняется явно- или неявнополюсным. На коллектор накладываются две пары щеток: поперечные b-6 н продольные а-а. Поперечные щетки 6-6 обычно замыкаются накоротко. На статоре помещаются обмоткн возбуждения Уь Уг, Уз,. , называемые обмотками управления, и компенсационная обмотка К, действующая по той же оси, что и обмотки управления, т. е. по продольной оси машины. Продольные щетки а-а являются рабочими щетками; от них берется выходная мощность, подводимая, например, к исполнительному двигателю. Работа ЭМУ поперечного поля протекает следующим образом.
Ток в обмотке У1 (или токи обмоток Уи Уг, Уз,...) создает продольный поток, который будет наводить в обмотке якоря при его вращения э. д. с. Ее наибольшее значение будем иметь на щетках Ь-Ь, поставленных на геометрической нейтрали; на щетках а-а она равна нулю. Так как щетки 6-6 замкнуты, то в обмотке якоря возникнет ток (ь, причем
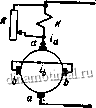
Рис. 5-76. Схема ЭМУ поперечного поля.
достаточно иметь очень небольшой продольный поток, чтобы этот ток был большим. Ток ib протекая по обмотке якоря, создает сильное поперечное поле, которое при вращении якоря будет наводить э. д. с. на щетках а-а. Таким образом, это поле является рабочим полем машины, что и дало повод к ее названию. Ток ia, поступающий во внешнюю цепь, проходит и по обмотке якоря и создает н. с, действующую против н. с. обмотки У. -Мы в этом можем убедиться, определяя при iaflaHHOM направлении потока обмотки У] направления созданных им токов h и затем токов ta, созданных поперечным потоком (отметим, что полярность щеток а-а при данном направлении продольного потока не зависит от направления вращения якори, так как при его изменении изменится по направлению ток Ib, а следовательно, и поперечный поток).
Намагничивающая сила якоря от токов ia должна быть, очевидно, скомпенсирована, что достигается при помощи компенсационной обмотки К, по которой проходит ток ia (или часть этого тока). Компенсации должна быть возможно более полной, так как в противном случае работа ЭМУ не может быть точной в отношении laquo;управления мощностью raquo; Явых-Поэтому иногда требуется опытным путем устанавливать необходимый ток в обмотке К при помощи шунтирующего ее реостата R. Здесь приходится считаться с действием продольной н. с. коммутируемых тетками Ь-Ь секций, созданной протекающими по ним добавочными токами при замедленной коммутации. В нормальных машинах мы этой н. с. обычно пренебрегаем, так как оиа мала по сравнению с н. с. обмотки возбуждения. В ЭМУ она может быть соизмерима с я. с. обмотки У) и, следовательно, должна учитываться.
В ЭМУ поперечного поля получается двухступенчатое усиление мощности, причем здесь коэффициент усиления ky может иметь очень высокие значения. Однако иа практике он не превышает 10 000.
Весьма ценным свойством ЭМУ поперечного поля является его малая laquo;инерционность raquo; и, следовательно, быстроотзывчивая реакция на изменение мощности, поступающей в обмотки управления. Эти обмотки имеют малые индуктивности в соответствии с малым потоком, создаваемым ими, и относительно большие омические сопротивления. Индуктивность обмотки якоря также относительно невелика.
В настоящее время ЭМУ поперечного поля изготовляются на мощности от десятых долей киловатта до нескольких деситков киловатт. Область кх применения весьма обширна. Они применяются там, где необходимо управлять большими мощностями путем изменения малой мощности: например, для питания относительно мощных исполнительных двигателей. Большое распространение они получили в качестве вспомогательных машин для различных электроприводов, где позволяют получать автоматически наиболее благоприятные характеристики приводного двигателя.
д) Исполнительные двигатели постоянного тока. Довольно часто для автоматических устройств в качестве исполнительных двигателей применяются дви-
гатети постоянного тока. Их назначение, так же как асинхронных исполнительных двигателей, состоит в преобразовании электриче- ского сигнала (напряжении) в механическое движение. Как правило, они работают при независимом питании обмоток якоря и возбуждения. Обычно к обмотке возбуждения подводится постоянное напряжение, (Ув = const, а к обмотке якоря - напряжение управлении, Uy. В этом случае получается исполнительный двигатель с я к о р н ь( м управлением. Такие двигатели получили на практике преимущественное применение. Они выполняются на мощности от несколь1их ватт до сотен ватт и по устройству в основном не отличаются от обычнцх машин Постоянного тока. При меньших мощностях (1--5 вт) они делаются также с постоянными магнитами.
Для получения механической и регулировочной характеристик - n-f(M) при U-j =ccnst и n=f{Uy) при М = const, - возможно более близких к линейным зависимостям, исполнительные двигатели выполняются с малым насыщением стальных мчастков магнитной цепи. В отношении линейности регулировочных характеристик, пускового вращающего момента и других свойств исполнительные двигатели постоянного тока превосходит асинхронные исполнительные двигатели.
Если напряжение управления подводится к обмотке возбуждения прн постоянном напряжении иа зажимах якоря, го получается исполнительный двигатель с полюсным управлением. Такие двигатели находят себе ограниченное применение и строятся обычно на малые мощности. Они уступают двигателям с якорным управлением в отношении быстродействия, так как обмотка возбуждения имеет значительно ббльшую постоянную времени, чем цепь якоря. Оанако для них требуется меньшая мощность управления.
5-13. Потери и коэффициент полезиого действия
Потери в машине постоянного тока разделяются на:
1) магнитные потери в стали якоря Рс и в повер,хностном слое полюсных наконечников Рп ,
2) механические потери от трения: в подшипниках, вращающихся частей о воздух (сюда же надо отнести вентиляционные потери -на вращение, вентилятора, если он имеется), щеток о коллектор, Рмех;
3) электрические потери в обмотках цепи якоря и в переходных контактах щеток, Рэ,
4) потери на возбуждение Ра,
5) потери добавочные Р об.
Первые две группы потерь в сумме дают потери холостого хода (Рс+ 4-Рп-1-Рмех = Ро), так как соответствую-
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 [ 88 ] 89 90 91 92 |




