 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Радионавигационные системы, спутниковая радионавигация
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [ 16 ] 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67
Вероятность такого события для произвольно расположенного потребителя
- laquo; Я= laquo;Г-ЧС -4= (6.19)
Комбинациям спутников с соседними номерами соответствует минимальная ШППИ
min = (rt - 1) Д/i + Я] -*, (6.20)
а вероятность такого события
Р{тшЯ lt;:*} ={no-n + \)(Cf\ (6.21)
В общем случае величина Яй зависит от т (см. (6.17)),
IJScn = ГЦпЦ/п), а соответствующую вероятность можно определить следующим образом:
Р[ ni: (т)} ={по-п) 6:z?(C:f\ (6.22)
Формула (6.22) описывает распределение вероятности значений ШППИ от п спутников системы. Если же в ЗРВ попадает не менее п спутников системы, то соответствующее значение вероятности (накопленная вероятность) можно рассчитать по формуле
F{rf::{m)} = 2 p{!f::.\m)}.
(6.23)
0,16
0,12 0,10 0,08 0,06 0,01* 0.02 0,00
12 16 а)
/ / 1 | ||||
20 m
20 m
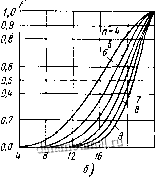
Рис. 6.2. Плотность вероятности полосы спектра (а) и интегральное распределение ширины полосы (б) принимаемого излучения при частотном разделении сигналов в ССРНС
Таблица 6.2
Усредненные значения ШППИ
В. град | ДЬ/Яо % | Яо, МГц | тахЯо , МГц |
5 10 | 39,2 58,4 201,6 | 43,0 66,0 250,0 | |
5 10 50 | 36,9 53,9 189,2 | 43,0 66,0 250,0 | |
5 10 50 | 35,5 50,9 174,4 | 43,0 66,0 250,0 |
На рис. 6.2 представлены распределения Р{Я11? {т)\ и ?[Пй (т)); для удобства по оси абсцисс отложены величины т, а соответствующие полосы Пп (т) могут быть рассчитаны по формулам (6.15) или (6.17). Данные рис. 6.2 полезны для расчетов в конкретных ситуациях. Для получения глобальных оценок используют усредненные характеристики. В табл. 6.2 приведены значения ШППИ, усредненные по числу видимых ИСЗ и их возможным комбинациям,
ЯТ= шА/, + Я
(Вр.В.К)
где/п= S Z, т{п)р{т.)р{п),
причем распределения параметров р{т), р{п) и элементарный символ высокоточного дальномерного кода соответствуют системе laquo;Навстар raquo;.
Разница между щириной полосы, занимаемой излучением всех ИСЗ системы, и усредненным значением ШППИ возрастает с увеличением частотного разноса между несущими и с уменьщением угла раскрыва антенны приемного пункта.
6.4. ОСОБЕННОСТИ РАЗДЕЛЕНИЯ СИГНАЛОВ В АКТИВНЫХ СРНС
При разделении сигналов в активных СРНС решаются два типа задач: разделение сигналов, излучаемых НИСЗ-ретранслято-рами в сторону НЦН; разделение сигналов, излучаемых П.
Первая задача более простая и обычно решается с помощью пространственной либо частотной селекции. Пространственная селекция применяется в основном для разделения излучений стационарных или квазистационарных спутников-ретрансляторов.
медленно изменяющих свое положение относительно НЦН. При быстром перемещении НИСЗ-ретрансляторов используется частотная селекция. Возможен также комбинированный способ, использующий оба типа разделений.
Решение второй задачи зависит от общего принципа построения активной системы и от вида доступа к ретранслятору НИСЗ - регулярного или случайного. Запросным активным системам соответствуют регулярные способы уплотнения - разделения сигналов объектов, причем эти методы линейны в принципе, поскольку, как и в случае пассивной СРНС, объекты случайно расположены относительно НИСЗ.
Беззапросные активные системы можно построить на основе как регулярных методов уплотнения -; разделения (работа П по расписанию, система с вызывными каналами), так и случайных (системы со случайным доступом к ретранслятору). Как уже отмечалось в sect; 4.6, недостатком регулярных методов разделения в активных системах является низкая пропускная способность, а случайным .методам присущи взаимные помехи между разделяемыми сигналами.
Известны активные СРНС с регулярным разделением сигналов, например, системы, построенные на спутниках ATS-1, ATS-3 и ATS-5, laquo;Марсат raquo; (по запросу с НЦН), а также системы laquo;Аэросат raquo;, laquo;.Эол raquo; и др. [92, 108, 124].
В экспериментах со спутниками ATS-1, ATS-3 и ATS-5 на навигационный сигнал накладывалось дополнительное требование хорошей совместимости с цифровой системой связи [92], поэтому дальномерные коды вводились в поток цифровых данных линий связи. Длительность дальномерных сигналов составляла десятки миллисекунд, так что отрезок времени для определения дальности в каналах связи был весьма мал по сравнению с длительностью связных сообщений.
В системах laquo;Марсат raquo; и laquo;Аэросат raquo; наблюдение за объектами осуществляется .опросным способом по каналам независимого наблюдения. Дальномерный код и адрес запрашиваемого П передаются с НЦН на П через ИСЗ-ретранслятор. Разделение радиолиний запроса и ответа частотное. В системах могут использоваться различные типы модуляции: узкополосная ЧМ, дельта-модуляция, модуляция длительности импульса, манипуляция сдвига фазы и частоты. Длительность запросного сигнала 0,5 с.
Примерами активных беззапросных систем, в основе которых лежит метод случайного (свободного) доступа к НИСЗ-ретранслятору, являются проекты системы AATMS (Advanced Air Traffic Management System) [124], разрабатываемые для управления воздушным движением различными фирмами США.
Проект фирмы Boeing рассчитан на одновременное наблюдение за 10* объектами, предполагается использовать временное, частотное и кодовое уплотнения дальномерных сигналов.
Проект отделения Autonetics системы AATMS рассчитан на одновременное обслуживание Ю* объектов. Дальномерный сигнал от каждого объекта излучается периодически и представляет собой 3-импульсную посылку (триплет), каждый импульс которой есть ФМ сигнал. Для образования требуемого ансамбля сигналов (Ю) предполагается применять ,10 псевдошумовых кодов, 10 частот, 100 различных интервалов между первым-вторым и вторым-третьим импульсами.
При использовании указанного ансамбля сигналов возможны три вида погрешностей, обусловленных; 1) кодовым разделением сигналов, 2) неполным частот-
Рис. 6.3. Навигационный сигнал активной системы проекта ААТМ


ным разделением, 3) наличием определенной вероятности перекрытия сигналов объектов, имеющих одинаковые код и частоту.
Погрешности 1-го вида зависят от корреляционных свойств примененных кодов и Оцениваются по формулам (6.4) и (6.5) с учетом вероятности перекрытия сигналов от различных объектов, имеющих либо разный код, но одинаковую частоту излучения и частичное или полное перекрытие импульсов, либо одинаковые код и частоту излучения и частично перекрывающиеся импульсы со сдвигом, не меньшим длины элементарного символа кода.
Погрешности 2-го вида зависят от частотного разноса сигналов различных объектов и также оцениваются по формулам (6.4) и (6.5). Вероятность их появления зависит от расположения объектов, имеющих различные частоты, но одинаковые коды и интервалы между импульсами триплета.
Погрешности 3-го вида не позволяют практически разделять сигналы различных объектов. Оценим вероятность такого события.
На рис. 6.3 изображен сигнал, излучаемый г-м объектом, где Т - период повторения триплетов, т - длительность триплета, т ~ длительность импульса триплета, х,- длина элементарного символа адресного кода, \ti и Д(2 - интервалы между первым - вторым и вторым - третьим импульсами триплета соответственно. Примем, что общее число излучающих объектов Л, число используемых частот п, число кодов т, число различных временных интервалов между первым - вторым и вторым - третьим импульсами /. Тогда иа одной частоте с одинаковыми кодом и первым или вторым временными интервалами между импульсами излучают М потребителей, М = i(rnnl)~\
Вероятность неразделения сигналов от нескольких П (вероятность перекрытия по два импульса триплета от нескольких объектов) равна сумме вероятностей перекрытия двух первых или двух последних импульсов от различных П, если интервалы Aii и Л/г различны:
{Ai,}n{A2} = 0. (6.24)
Если Ail и А/г одинаковы, то вероятность неразделения сигналов увеличится на значение вероятности перекрытия импульсов с различными номерами; 1-й пары одного П и 2-й пары другого.
Вероятность Я неразделения первых пар импульсов от различных П при условии (6.24) можно вычислить по формуле
Р ,= 2 Р,(тз) = 1- 2 Р,(т,), (6.25)
*=2 4=0
где Р*(тэ) - вероятность того, что на вход приемного устройства ретранслятора НИСЗ поступают сигналы от k потребителей со сдвигом во времени, не превышающим Тэ.
Вероятность Pt(x,) с учетом несинхронности излучений различных П между собой и случайности их расположения относительно НИСЗ можно представить в виде
*(т,) = С laquo;,(т,)*[1 -Р,(т,)]-*, (6.26)
где Р1(тэ) - вероятность того, что начало любого из принимаемых триплетов попадает в интервал длительности х, при средней длительности триплета т; очевидно, Р(т,) = т,(Г -т)~.
При AJ raquo;1 и Я(тэ) lt; 1 второе слагаемое под знаком суммы во втором равенстве (6,25) значительно меньше первого н вероятность перекрытия первых двух импульсов триплета приближенно можно оценить по формуле
Я 1~1-[1-МЯ,(т,)] = МЯ,(тз).
(6,27)
Пусть, например, Л=10 т = п=10, /=100. Тэ = 0,1 мкс, Г= 1 с, т = 40 мкс, д7Г+Д/2=40 мкс. Тогда на одной частоте с одинаковым кодом и одинаковым временным интервалом между первым и вторым импульсами триплета могут излучать Л1=100 П. Если учесть, что активны не все П, то величину М следует еше уменьшить. Вероятность Я(тэ)= 1,0016-10~, а вероятность неразделения двух первых сигналов триплета при условии (6.24) PhiIO даже в расчете на максимальное М, соответствуюшее активности всех П.
Вероятность перекрытия последних пар триплетов Я 2 рассчитывается по аналогичным формулам, составленным относительно моментов принятия сигналов. Поскольку число возможных временных интервалов между последними двумя импульсами и между первыми одинаково (/), то P 2 = P i. Следовательно, при условии (6.24) вероятность неразделения сигналов Я равна удвоенной вероятности перекрытия первой пары импульсов, излучаемых различными П: Р - = 2Я .
Можно также показать, что при (A/ij = (A/2J вероятность неразделения сигналов Я равна учетверенной вероятности P i, поскольку сушествует BepoHTj ность перекрытия разноименных пар импульсов триплетов от различных П (первой пары со второй и наоборот). Если же (Аг}П(А/21 = (А/з), то P lt;4P i. Таким образом, для произвольных (A/ij и (А/2) вероятность неразделения сигналов изменяется в следующих пределах:
2Я lt;Я lt;4Я ,
(6.28)
где Ян1 определяется по формулам (6.25) или(6.27). Для рассмотренною примера 2-10~ ! lt;Я ! lt;4-10~.
Ранее оценивалась вероятность перекрытия пары импульсов триплета, соответствующая невозможности выделения сигналов П.
Представляет интерес оценить также вероятность перекрытия одного из импульсов триплета P i, приводящего к ухудшению вероятности обнаружения сигналов нескольких П. При этом вероятностная модель значительно усложняется, поскольку необходимо учитывать корреляцию между моментами появления импульсов в триплете, и выражение, аналогичное (6.26), имеет более сложную структуру. Однако вероятность перекрытия по одному импульсу триплета можно оценить с помощью соотношения, аналогичного (6.27), с учетом упрощающих соотношений при М/ gt;1 и Р(тэ) lt;?;1.
Полную группу событий (как и ранее) составляют k импульсов принимаемых триплетов, начинаемых в интервале времени [хо, хо + т:,] при произвольном Хо, причем k = 0, 1, Ш. Рассуждая так же, как для случая перекрытия пар импульсов, можно получить упрощенную формулу для вероятности перекрытия Одного из импульсов триплета при Л gt;1; Р(т5) lt;1:
Р ,ггЗШР(тэ).
(6.29)
Для рассмотренного примера P i~3-10 l.
Таким образом, с помощью формул (6.25) -(6.29) можно рассчитать требуемые параметры сигналов активной СРНС по заданным вероятностям неразрешения сигналов и взаимных помех.
В заключение отметим, что анализ взаимных помех в активных и пассивных СРНС в гл. 6 проводился для оптимального построения устройств обработки выбранных ансамблей сигналов. Вопросы же построения самих оптимальных устройств обработки навигационных сигналов СРНС рассмотрены в гл. 7-9.
ГЛАВА 7
ПРИНЦИПЫ ПОСТРОЕНИЯ ИЗМЕРИТЕЛЬНО-ВЫЧИСЛИТЕЛЬНОЙ АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ
М. ОБОБЩЕННАЯ СТРУКТУРНАЯ СХЕМА АП ССРНС
Аппаратура потребителей (АП) предназначена для определения пространственных координат и параметров движения объекта навигации по результатам измерений при использовании информации, содержащейся в кадре принимаемых от НИСЗ радиосигналов. Прм этом под параметрами движения понимаются три составляющие вектора скорости, в частном случае - составляющие вектора ускорения, а также производные от них параметры, нужные для управления движением объектов. С учетом специфики функционирования спутниковых радионавигационных систем к определяемым АП параметрам относят также поправки к шкалам времени и частоты местного собственного хранителя времени и опорного генератора.
Для рещения своей основной задачи АП принимает излучаемые каждым НИСЗ радиосигналы, производит синхронизацию по всем компонентам модуляции радиосигналов, из.меряет радионавигационные параметры этих радиосигналов, выделяет навигационное сообщение от каждого из НИСЗ и обрабатывает полученную информацию, преобразуя ее в оценки координат и параметров движения. Весь этот процесс называют иавигацион-но-временным определением (НВО).
Для гражданской АП (морских, воздушных, наземных и космических) НВО предназначено для безопасного и наивыгоднейшего вождения объектов, а для военной АП - для обеспечения выполнения боевых задач [164, 186].
Следует отметить, что высокая точность НВО, обеспечиваемая сетевыми СРНС, значительно расширила круг потенциальных потребителей спутниковых навигационных систем. Аппаратуру потребителей начинают широко использовать для точной топогео-дезической привязки объектов, для синхронизации шкал времени (ШВ) хранителей времени, для сверки частоты опорных генераторов и эталонов частоты и для решения иных задач (см. гл. 12).
На рис. 7.1 изображена обобщенная структурная схема АП-; в состав которой входят антенна, СВЧ усилитель и преобразователь радиосигналов, аналого-цифровой процессор первичной обработки принимаемых сигналов (с блоками поиска, слежения, навигационных измерений и выделения навигационных сообщений), навигационный процессор, интерфейс или блок обмена информацией, опорный генератор (ОГ) и синтезатор частот, источник питания, пульт управления и индикации, блок управления антенной. Штриховыми линиями выделены блоки, наличие которых в составе АП не является безусловным, а определяется
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [ 16 ] 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 |




