 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Радионавигационные системы, спутниковая радионавигация
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 [ 18 ] 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 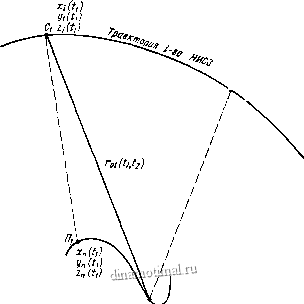
Рис. 7.3. Взаимное расположение НИСЗ (точка С) и потребителя (точка П) в моменты излучения и приема радиосигнала: ti - момент излучения, - момент приема; го.- измеряемая геометрическая дальность
Траектория объекта - потребителя
распространения сигнала roi{t)/c НИСЗ и П изменили свои координаты. Это изменение необходимо учитывать при составлении и решении навигационных уравнений.
Для синтеза и анализа устройств измерения дальности и скорости удобнее пользоваться представлением (7.4) в виде ряда Тейлора:
Го,(/) = Го, + 0,(0 + roi + ... + rifS.
(7.5)
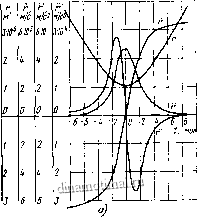
Для низкодинамичных объектов (с малыми скоростью и ускоре- нием) члены этого ряда быстро убывают, обусловливая хорошую сходимость ряда на интервалах времени, сравнимых с laquo;временем памяти raquo; устройств измерения, и поэтому при практических расчетах производные выше 3-й степени во внимание не принимаются [164] (рис. 7.4).
Глобальность и возможность непрерывного определения координат с помошью ССРНС типа laquo;Глонасс raquo; и laquo;Навстар raquo; увеличат номенклатуру потребителей по сравнению с СРНС laquo;Цикада raquo; и laquo;Транзит raquo;. Появилась возможность использовать АП на высокодинамичных самолетах и космических агшаратах. Это значительно расширило диапазон значений производных дальности ii скорости. Так, при координированном развороте самолета с углом крена 45 deg; дополнительное постоянно действующее ускорение составляет 10 м/с [127], при выполнении маневров самолетами типа F-16 ускорение может достигать 100 м/с [135]. При этом
J га
lt; | |||||
too - | t.MUH | ||||
Рис. 7.4. Динамика движения объекта; потребитель неподвижный наземный, высота орбиты 1000 (а) и 20 ООО (б) км
наряду с ускорениями могут присутствовать последующие производные дальности. Например, 3-я производная при резких маневрах, называемая laquo;рывком raquo;, может достигать 100 м/с. По данным [189] АП гражданских самолетов должна отслеживать НИСЗ во время маневров с ускорениями до 30 ,м/с и скорости изменения ускорения 15 м/с*.
С учетом изложенного в (7.5) го;, гщ, гы - случайные величины, характеризующие соответственно начальную дальность, постоянные составляющие радиальной скорости и радиального ускорения. Обычно считают, что эти величины являются гауссовскими с известными характеристиками.
В ряде случаев для описания запаздывания радиосигналов, учитывающего взаимную подвижность объектов, целесообразно использовать линейную модель, выражаемую следующей системой уравнений [153]:
г(()= laquo;(()
ш,(0==-аош(0 + ао laquo; ((), (7.6)
где v(t) и w{t) - случайные процессы, определяющие соответственно радиальную скорость и радиальное ускорение; laquo;о - величина, обратная постоянной времени маневра; laquo; raquo;(() - гауссовский стационарный белый шум.
При такой модели ускорение рассматривается как случайный процесс с экспоненциальной функцией корреляции
k.{T) = M\w{i)w[l + T)\ = a,exp(-c(o)тi), (7.7)
где Q% = Оо iV /4, М[ {t)n.{t + т)] = Л/ б (т)/2, = const.
Для дальнейшего изложения целесообразно привести матричную форму записи системы уравнений (7.6). Полагая
r{t) | |||||||
\{t) = | v{t) | , A = | |||||
w{t) | - laquo;0 |
получаем
X(0 = AX(0 + GN,(0-
(7.8)
Ясно, что системой (7.8) можно учитывать и более высокие производные.
В (7.7) дисперсия ускорения at и коэффициент ао, характеризующий интервал корреляции процесса определяются типом и подвижностью объекта навигации. Если переменные г, v, W - случайные величины, а не процессы, то модель (7.6) переходит в полиномиальную (7.5).
На точность измеряемых навигационных параметров сильно влияет ограниченная стабильность опорного генератора АП. Вы-сокостаби,льные кварцевые генераторы с термостатированием характеризуются номинальной частотой и действительным значением частоты (ДЗЧ), которая в рабочем режиме флуктуирует под воздействием внешних факторов. Многочисленные исследо;, вания стабильности частоты кварцевых и других генераторов показали, что влияние различных источников шума (белый фазовый шум, белый частотный шум, мерцание фазы и частоты, случайное блуждание частоты) можно свести к модели, которая описывается спектральной плотностью частоты в виде дробно-рациональной функции, причем соответствующие дисперсии флуктуации частоты пропорциональны а;т) = т, где 4, -2.....
1, О, 1, 2 [83]. Это позволяет для описания модели флуктуации фазы использовать уравнения, подобные (7.6). Следует отметить, что уходы ДЗЧ с интервалом корреляции более десятков секунд можно определить при решении навигационно-временных задач. Флуктуации ДЗЧ со значительно меньшими интервалами корреляции не могут быть оценены и становятся источниками дополнительных погрешностей.
Под действием на ОГ указанных ускорений и их производных появляется так называемая laquo;-неустойчивость raquo;, составляющая по оценкам специалистов 10 1 [ИЗ]. Для уменьшения влияния ускорений следует использовать дополнительную информацию от датчиков ускорений автономных навигационных систем объекта.
7.4. ВИДЫ И МОДЕЛИ ПОМЕХ
Радиосигналы от НИСЗ, принимаемые АП, всегда в той или иной степени искажаются под воздействием аддитивных и неаддитивных помех. Применительно к АП многообразие аддитивных помех в довольно общем случае можно представить в виде следующих компонент:
широкополосная флуктуациониая помеха n{t}, узкополосная флуктуациониая помеха u{t), хаотическая импульсная помеха ti(/),
имитационная помеха y(t) = s {t-\-r), повторяющая принимаемый сигнал в частном случае полезный сигнал при многолучевом распространении).
Широкополосная флуктуациониая помеха n(t) учитывает, во-первых, наличие :обственных шумов входных цепей радиоприемника, антенны, фидерного тракта I, во-вторых, космических шумов, радиоизлучения Солнца, а также станций помех, действующих в околоземном пространстве. Помеха n{t) представляется стационарным гауссовским белым шумом со следующими характеристиками:
М[п(/)] = 0. УИ[п(0п(/--т)]=Лоб(т)/2, Ло = сопз1. (7.9)
Аппаратура потребителей всегда функционирует одновременно с другими радиотехническими средствами, которые создают непрерывные и импульсные излучения. При этом ввиду высокой чувствительности радиоприемников АП помехами в данном случае большей частью оказываются побочные излучения радиотехнических систем.
За модель узкополосиой помехи u{t) принимают гауссовский белый шум, прошедший через колебательный контур и описываемый уравнениями вида
laquo; = И, = - 2у U, - ши-I-ш gt; (0. (7.10)
где n (t) - формирующий белый шум с характеристиками М[л (/)]=0, М[Пп(1\)Х Xn {t2)] = N b{t2 - ti)/2, A, = const; и и 7 - резонансная частота и затухание формирующего колебательного контура. Дисперсия узкополосного процесса u{t)
cl = N (o/8y .
Модель хаотической импульсной помехи можно представить в виде процесса r]{t) = r] (t)cos{u,ot + (fn), (7.11)
где т] (/) - случайная последовательность помеховых видеоимпульсов, фп - случайная фаза помехового сигнала.
Случайную последовательность помеховых видеоимпульсов ti (() часто аппроксимируют дискретным марковским процессом, причем случайными являются .значения амплитуд и длительностей импульсов, а также интервалов между ними. Более детальное описание импульсной помехи можно найти в [156].
Имитационную помеху при многолучевом распространении можно представить суммой сигналов, описываемых выражением (7.1), с той лишь разницей, что каждый у-й сигнал этой суммы имеет случайные амплитуду Ар задержку т,/ и начальную фазу Aiptj. Для помех этого типа характерно то, что они оказывают мешающее воздействие как мультипликативные. Возникающая при этом интерференция может приводить к резким и длительным замираниям принимаемых сигналов.
7.5. ОСНОВЫ СТАТИСТИЧЕСКОГО СИНТЕЗА ИЗМЕРИТЕЛЕЙ РАДИОНАВИГАЦИОННЫХ ПАРАМЕТРОВ
Из изложенного вытекает, что задачи анализа практически реализуемых и синтеза оптимальных измерителей радионавигационных параметров ПО и фильтров ВТО являются статистическими. Сочетание статистических методов анализа и синтеза, основанных на вероятностном описании процессов, протекающих в АП, и на описании моделей навигационных параметров, сигналов и помех с помощью категорий пространства состояний, представляют собой основу статистической теории радионавигации.
Среди методов анализа и синтеза радионавигационной АП наиболее эффективны методы марковской теории оптимальной нелинейной фильтрации, которая в последние годы получила полное и строгое развитие в ряде фундаментальных работ [153, 156, 173]. Поскольку марковская теория оптимальной нелинейной фильтрации свободна от существенных ограничений, накладываемых другими теориями, появилась возможность решать задачи оптимального приема для весьма большого класса сигналов, в том числе для сложных ФМ радиосигналов ССРНС при макси-мально возможной адекватности моделей реальным радиосигналам, навигационным параметрам и помехам.
Основные достоинства марковской теории оптимальной нелинейной фильтрации применительно к синтезу радиотехнических устройств заключаются в следующем:
возможность решать задачи синтеза многомерных стационарных и нестационарных, нелинейных и линейных систем в дискретном и непрерывных вариантах;
практическая реализуемость получаемых структур устройств приема и обработки радиосигналов и обеспечение минимальных погрешностей измерения и минимальных ошибок выделения информации;
рекуррентный вид алгоритмов обработки сигналов и информации, удобный для реализации в микропроцессорах и микроЭВМ, что сокращает объем вычислений и повышает их точность;
возможность обрабатывать наблюдаемые радиосигналы в реальном масштабе времени синтезируемыми нелинейными квазиоптимальными фильтрами.
Задача оптимальной нелинейной фильтрации навигационных параметров в общем виде формулируется следующим образом.
Навигационные параметры выражаются вектором состояния \{t), оптимальную Оценку которого следует получить. При этом модель формирования вектора \{t) описывается стохастическим дифференциальным уравнением
]=Mt.\{t)] + GJt)N{t), X(i ) = X. / gt;/ , (7.12)
где А[(, \{t)]=[ai{t, X), ait, X)..... a (t. X) ]-транспонированный вектор,
называемый вектором сноса, определяющий среднюю скорость изменения процес-
са Х(/ + А/) в фиксированной точке (X t); G,(/) - матрица, определяющая коэффициенты диффузии процесса Х(/-ЬЛ/) в фиксированной точке (X, г) и характеризующая скорость изменения условной ковариации составляющих вектора X (i); fix{t} - вектор формирующих гауссовских белых шумов с нулевым математическим ожиданием M(N,(())=0 и интенсивностью MjN,(/i)N,(r2) =
Наблюдаемый процесс, т. е. аддитивная смесь принимаемых сигналов S(t) вида (7.1) и шумов N(/), представляется в виде
н (/)= S(;,x) + N{0, i gt; 0
где вектор белых гауссовских шумов N(/) характеризуется также нулевым математическим ожиданием и корреляционной функцией
M{N{t,) N(;,) = N й(
В предположении взаимонезависимости шумов и N в теории доказывается, что апостериорная плотность вероятностей вектора состояния X(i) удовлетворяет уравнению Стратоновича и имеет гауссовскую аппроксимацию. В результате минимизации апостериорного среднего риска при использовании квадратичной функции потерь и гауссовской аппроксимации апостериорной плотности вероятности (что справедливо, если ошибки оценивания не выходят за пределы линейного участка дискриминационных характеристик оптимальных дискриминаторов) уравнение для квазиоптимального алгоритма нелинейного непрерывного оценивания имеет вид
-У== Аг,Х (01 + К(-Л D S(/,X*(/)) N,74 2(/)-S f lt;,X* (/))], (7.14) где X(/) -оценка вектора Х(/), а качество оценивания характеризуется кова риационной матрицей К (i) апостериорных ошибок фильтрации, определяемой как решение дифференциального уравнения вида
D[A(X,/)1 Kit) + К(0 D[A(X ,/)I + К(0 D{D[s(X./)J { B(t) -- S(X,/)]) K(t), (7.15)
где D[ - I - матрица Якоби, соответствующая вектору, помещенному внутри скобок. Например,
da. da
D{A(X-,/)} =
dx, da,
da ~dx
Структура оптимального в гауссовском приближении устройства нелинейного измерителя непрерывного процесса Х(/), соответствующая уравнению (7.14),
ггредставлена на рис. 7.5.
Многомерный вход Н(() нелинейного квазиоптимального фильтра характерен для многокаиальной АП с несколькими антеннами. Примером такой АП может быть аппаратура транспортного космического корабля, угловое положение которого в пространстве, в том числе ориентация относительно НИСЗ ССРНС, могут быть произвольными, а определять координаты необходимо непрерывно.
Уравнения фильтрации и структура фильтра значительно упрощаются при одномерном входе, когда наблюдаемая смесь радиосигнала и шума (;) - скалярная величина вида
l(t)==-s[\(t), t\+n{t\ (5?о.
(7.16) П7
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 [ 18 ] 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 |




