 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Радионавигационные системы, спутниковая радионавигация
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 [ 42 ] 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67
НИСЗ
Пункт i
нисз
эч
Пункт J
АПШВ
нисз
АСШВ
нисз
АПШВ
НИСЗ
АСШВ
40нисз;э ч нисз
Рис. 17.1. Структурная с.хе.м: синхронизации ШВ сети пунктов по сигналам СРНС: ЭЧ - эталон частоты: АПШВ - аппаратура приема шкал времени; АСШВ - аппаратура сверки шкал времени
добного способа синхронизации сети пунктов является использование для этого аппаратуры потребителей ССРНС.
Нередко возникает необходимость привязать ШВ некоторого 1-го пункта не к ШВ НИСЗ, а к ШВ некоторого другого /-го пункта. В качестве примера можно привести сверку вторичного эталона частоты (ВЭЧ) и первичного эталона частоты (ПЭЧ). В этом случае сведение ШВ с помощью НИСЗ может быть осуществлено в соответствии со структурной схемой, изображенной на рис. 17.2. Каждый из пунктов определяет рассогласование своей ШВ относительно ШВ системы НИСЗ. Затем у-й пункт, где расположен ПЭЧ, передает информацию о рассогласовании (Д/; = / з - ) на i-й пункт, где расположен ВЭЧ. На этом последнем пункте в аппаратуре обработки сравниваются размеры рассогласования (нисз-пэч) и (нисз -вэч) и расхождение ШВ ПЭЧ и ВЭЧ определяется как их разность. При необходимости ШВ ВЭЧ кор-
Пункт i
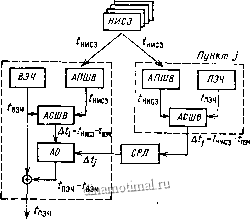
Рис. 17.2. Структурная схема сверки ШВ первичного и вторичного ЭЧ:
СРЛ - связная радиолиния; АО аппаратура обработки
ректируется. Для передачи информации о рассогласовании (А/ = = нисз - пэч ) на пункт, где расположен ВЭЧ, допустимо использовать любую связную радиолинию, которая может быть узкополосной, поскольку данная информация медленно изменяется и легко преобразуется в цифровую форму. Если информация о ШВ ПЭЧ необходима широкому кругу потребителей, то она может быть передана им через НИСЗ.
17.2. ОЦЕНКА ТОЧНОСТИ СВЕРКИ ШВ УДАЛЕННЫХ ПУНКТОВ
ПО ВЫБОРКЕ ОДНОВРЕМЕННЫХ ПСЕВДОДАЛЬНОМЕРНЫХ ИЗМЕРЕНИЙ
Основными источниками погрешностей сверки ШВ по сигналам ССРНС являются:
погрешности знания векторов состояния НИСЗ, которые обусловлены погрешностями эфемеридного и частотно-временного обеспечения НИСЗ;
погрешности измерения времени прихода радионавигационных сигналов, которые складываются из погрешностей калибровки, шумовых и динамических погрешностей измерителя РНП, погрешностей из-за условия распространения радиоволн и прочих составляющих;
погрешности знания векторов состояния синхронизируемых пунктов, которые в рассматриваемом случае определяются погрешностями задания координат пунктов.
При анализе точности сверки ШВ по сигналам ССРНС необходимо учитывать корреляцию погрешностей определения поправок к ШВ различных пунктов, вызванную воздействием одних и тех же возмущающих факторов. Для этого необходимо знать коэффициенты корреляции различных составляющих погрешности для каждого из пунктов и коэффициенты взаимной корреляции для различных пунктов. Точно знать эти коэффициенты практически невозможно, поэтому при оценке точности приходится задаваться теми или иными гипотезами относительно их значений. Целесообразно рассмотреть крайние случаи, когда коэффициенты корреляции погрешностей знания векторов состояния НИСЗ и погрешностей измерителя (кроме погрешностей калибровки) радионавигационных параметров равны либо нулю (независимые погрешности), либо единице (систематические погрешности). При этом учитывается, что коэффициент корреляции погрешностей калибровки для каждого измерителя равен единице, а коэффициент взаимной корреляции цдя различных измерителей - нулю.
Поправка к ШВ /-го пункта, координаты которого неизвестны, определяется по результатам измерений задержек т - (/=1, 2, п) принимаемых сигналов НИСЗ относительно ШВ этого пункта решением линеаризованной системы уравнений невязок квазидальностей rii = cxji (с - скорость света):
б? = С;/ bq, - Cji Ai 6q,- + т], + :
1=1,.... n.
(17.1)
где C,v-матрица наблюдений, 6q, - вектор оцениваемых параметров (прямоугольные геоцентрические координаты пункта и поправка к ШВ б ) dq,- - вектор погрешностей состояния НИСЗ (погрешности временного и эфемеридного обеспечения в орбитальной системе координат). А,- оператор преобразования из орбитальной в геоцентрическую систему координат, г, - погрешность калибровки приемоизмерительного тракта, g - - погрешности измерителя РНП.
Включение координат /-го пункта в вектор оцениваемых параметров позволяет в обшем случае решить навигационно-времен-ную задачу, т. е. определить координаты и поправки к ШВ пункта.
Смещение шкалы g-ro пункта, работающего по тому же созвездию НИСЗ, что и /-Й пункт, определяется аналогично. Сдвиг шкалы /-Г0 пункта относительно шкалы g-ro пункта (A/,g) вычисляется по формуле
Atig = bti-btg.
(17.2)
При оценке точности взаимной синхронизации двух пунктов jug будем считать, что по измерениям х; и Xgj методом наименьших квадратов определяется суммарный вектор [SqJSqg , причем погрешности измерений РНП распределены по гауссовскому закону. Если весовая матрица есть а1, где а?- дисперсия погрешностей измерителя, I - единичная матрица размером [2пХ2л], то можно показать, что корреляционная матрица погрешностей суммарного вектора примет вид
к= к
(1-г)аг2 с;,с,+ к, о
(1-л)а,- 2 q,c ,-f к;
1=1 о
+ (1-)01
S с;, с а, к, а; с;, с, 2 с;, с, а, к. а; с;, с
2 q,c,a,k a;c;,c - 2 с а, К. а; cv с
i= 1 = I
(2 с,с а) к.(2 Ajc;,c,) (i с;с,а) к.(2 Ajc;,c;i)
2 cj,c.,-aJ) k,(2a,c;c,J) 2 cvc a!) R,(2 a; с; с,!)
0-2 c;,c,+ l?-
k , (17.3)
K Rg, Ks - корреляционные матрицы погрешностей априорного знания векторов состояния пунктов и НИСЗ; г - коэффициент корреляции погрешностей измерителя; rs - коэффициент корреляции погрешностей априорного знания векторов состояния НИСЗ; - дисперсия погрешностей калибровки измерителя РНП. Если представить выражение (17,2) в виде
A/,-,= N
(17,4)
где N = [0001000-1], то среднеквадратическую погрешность определения сдвига шкалы времени /-го пункта относительно шкалы g-ro пункта можно вычислить по формуле
(17,5)
Для анализа точностных характеристик (17.5) целесообразно выразить через соответствующие геометрические факторы:
fr 2 I Г2 2 , т-,2 2
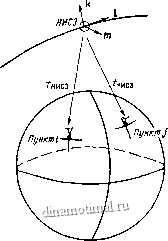
где Tir, Г, Г ( ,: ,: : .,) - геомстри-ческие факторы, характеризующие влияние погрешностей измерителей, калибровки и априорного знания векторов состояния НИСЗ на точность определения сдвига ШВ /-го пункта относительно ШВ -го пункта; ak-or.am-Ost - отношение составляющих погрешностей эфемеридного (направленные по радиус-вектору к, вдоль орбиты I, по бинормали т, как показано на рис. 17.3) и временного обеспечения НИСЗ.
Можно показать, что если ШВ сверяются по разным созвездиям и погрешности измерений на /-м пункте не коррелированы с погрешностями измерений -го пункта (независимая сверка), то Од равна сумме дисперсий определения поправок на каждом из пунктов. Если же измерение на пунктах производится одновременно и по одному и тому же созвездию, то часть погрешностей взаимно компенсируется подобно тому, как это имеет место при работе по РНС в дифференциальном режиме (см. гл. 20).
Диапазоны изменения геометрических факторов при относительной сверке ШВ двух пунктов, разнесенных примерно на 2600 км, по данным ССРНС laquo;Навстар raquo; представлены в табл. 17.1.
Анализ приведенных в таблице результатов показывает, что значения геометрических факторов Го, Го, Fi при сверке ШВ пунктов с известными координатами в 3...5 раз меньше, чем при сверке ШВ пунктов с неизвестными координатами. Коэффициент корреляции погрешностей знания векторов состояния НИСЗ практически не сказывается на точности относительной сверки
Рис. 17.3. Геометрия сеанса сверки ШВ по одному НИСЗ
Таблица 17.1
Диапазоны изменения геометрических факторов
Геометрические факторы | Априорная информация | |
при известных координатах пунктов | при неизвестных координатах пунктов | |
Гео Ге1 Го Г, | 0,5...0,7 0 0,13...0,20 0,11...0,33 | 1,5...3,7 0 0,5...1,3 0,4...1,3 |
ШВ пунктов. Выигрыш в точности зависит от соотношения систематических и независимых составляющих погрешности временных определений.
Отличительной особенностью сверки ШВ пунктов с известными координатами является возможность работы лишь по одному НИСЗ. Выражение для Од,, при этом существенно упрощается. Если ось ОХ геоцентрической системы координат развернуть так, чтобы она проходила через НИСЗ, а ось 0Y совпадала с плоскостью орбит, то при п - 1 (17.5) примет вид
ом. = ~\J2 (1 - г) 0 -f 2о -f (cosa,- - cosog)
2 2 I
-f (COSP, - COSPg) (T? -f (cosy, - COSyg) Om, (17.6)
где cosa, cosp, cosy - направляющие косинусы координатных углов с пункта на НИСЗ.
Из (17.6) следует, что вклад отдельных составляющих погрешностей эфемерид в погрешность сверки ШВ пунктов зависит от взаимного расположения НИСЗ и синхронизируемых пунктов. Если НИСЗ равноудален от пунктов (симметричное расположение пунктов), то коэффициент при о* в (17.6) обращается в нуль, т. е. погрешность эфемеридного обеспечения по высоте не влияет на точность сверки. Аналогично при симметричном расположении пунктов относительно плоскости орбиты компенсируется составляющая погрешности эфемерид вдоль орбиты, а при симметричном расположении пунктов по одну сторону от орбиты компенсируется бинормальная составляющая погрешностей эфемерид. Таким образом, за счет правильного (симметричного) выбора НИСЗ при относительном способе сверки ШВ можно компенсировать две составляющие эфемеридной погрешности, включая высотную.
17.3. ПОТЕНЦИАЛЬНАЯ ТОЧНОСТЬ СВЕПСИ ШВ ПУНКТА С ИЗВЕСТНЫМИ КООРДИНАТАМИ ПО ДАННЫМ ПСЕВДОДАЛЬНОМЕРНЫХ И РАДИАЛЬНЫХ ПСЕВДОСКОРОСТНЫХ ИЗМЕРЕНИЙ
Сверка ШВ по данным ССРНС сводится к оценке расхождений ШВ и частот хранителей времени пункта и НИСЗ по результатам псевдодальномерных н псевдодальномерно-псевдодопле-ровских (радиальных псевдоскоростных) измерений. Временную задачу можно решать по выборке либо фиксированного, либо нарастающего объема измерений. Выражение для оценки точности в наиболее полном виде было представлено в sect; 17.2. Здесь же рассмотрим более детально влияние лишь случайных погрешностей измерителя РНП на точность временных определений, ха-
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 [ 42 ] 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 |




