 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Радионавигационные системы, спутниковая радионавигация
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 [ 45 ] 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67
каждой из областей. Если структура сети регулярна, т. е. такова, что видимые конфигурации созвездий НИСЗ повторяются через определенный промежуток времени, то в поле точностей может быть выделена элементарная структура, повторяющаяся во времени и в пространстве.
Для системы laquo;Глонасс raquo; размеры элементарной области составляют 1,5 ч ПО времени и 60 deg; по долготе. Кроме того, вследствие центральной симметричности структуры этой системы в любой момент времени относительно центра земного шара достаточно рассматривать ее точностные свойства только в одном полушарии.
19.1. РАСПРЕДЕЛЕНИЕ ВЕРОЯТНОСТЕЙ ГЕОМЕТРИЧЕСКИХ ФАКТОРОВ
Исследование поля точностей в зоне действия ССРНС позволяет выявить области повышенной и пониженной точности в пространстве и во времени. Результаты этих исследований, как правило, трудно непосредственно использовать для сравнения точностных возможностей различных конфигураций сети НИСЗ. Потребителю нередко достаточно знать, например, что в зоне действия системы среднеквадратическая ошибка (СКО) с заданной вероятностью не превышает некоторого наперед заданного значения. В этих случаях точностные возможности ССРНС достаточно полно характеризует так называемое интегральное распределение погрешностей навигационных определений. Оно показывает зависимость вероятности того, что эти погрешности не превышают некоторых заданных значений, от этих заданных значений при стучайном расположении П в зоне действия системы и случайном времени проведения навигационных сеансов. Достаточно сложно заранее определить законы распределения П в поле действия системы и законы распределения моментов проведения сеансов навигационных определений. При анализе точностных свойств ССРНС представляются логичными равномерные распределения П в зоне действия системы и моментов проведения навигационных сеансов.
Если по результатам навигационного сеанса определяется т-мерный вектор q, то интегральное распределение погрешности Л, г-й составляющей этого вектора записывается в виде
Д оо оо
/ д,(А)= \ J ... J \ w{AJ,s)dq ...,dq ,dtds, (19.1)
в каждой точке s зоны действия системы в момент (, т. е. если полагать, что условная плотность
- оо -оо
где s - вектор координат центра элементарной площадки ds, расположенной в зоне действия Q системы, w(A, t, s) - плотность вероятности случайного вектора t, s.\\.
Вычисление интеграла (19.1) достаточно сложно, даже если считать справедливым предположение о центрированном гауссовском законе распределения погрешностей определения вектора q
Ыд/s
(A/s,0 = V(2n) Ik,! ехр(-ДК7А ). (19.2)
Эти трудности объясняются сложной зависимостью матрицы корреляции погрешностей К, от координат П и времени даже при сравнительно простых конфигурациях сетей НИСЗ, причем указанные зависимости носят разрывной характер. Более того, вычисление интеграла (19.1) достаточно трудоемко даже для современных вычислительных средств, поэтому нередко вместо распределений д,(А) строят интегральные распределения среднеквадра-тических значений погрешностей навигационных определений, показывающие зависимость вероятности того, что СКО навигационных определений не превышает заданного значения, от этого заданного значения при равномерном распределении потребителей по всей зоне действия системы и по времени. Если воспользоваться терминами ГФ, то можно говорить в указанном смысле о кривых их интегрального распределения при равновероятностном распределении П в зоне действия системы и равновероятностном распределении моментов обсервации. Эти распределения уже могут быть определены, например, методом моделирования.
19.3. ТОЧНОСТЬ ОЦЕНКИ КООРДИНАТ И ВРЕМЕНИ
В качестве первого примера оценим точностные свойства двух из минимальных конфигураций ССРНС, т. е. таких, которые обеспечивают заданную кратность покрытия любой точки земного шара при минимальном числе равномерно разнесенных НИСЗ, обращающихся на заданном числе орбит. Математическое формулирование задачи отыскания состава минимальных систем не представляет сложностей и без ущерба для дальнейшего изложения может быть опущено. Результаты расчетов минимально необходимого числа НИСЗ на каждой из трех орбит, отвечающего сформулированным требованиям, приведены в табл. 19.1.
В табл. 19.2 для примера даны значения СКО определения координат места П, рассчитанные по (16.2), для глобальных СРНС с конфигурациями, приведенными в табл. 19.1 (при 4-кратном покрытии), угол возвышения не менее 10 deg;. Расчет точностей производился с использованием данных о погрешностях измерений и положений НИСЗ для системы laquo;Навстар raquo; (см. гл. 16).
Полученные результаты позволяют установить порядок значений возможных точностных характеристик ССРНС с минимальным числом НИСЗ. При обработке измерений от пяти и более НИСЗ в системе с 8-ч НИСЗ обеспечивается СКО определения места 6...7 м, высоты 10...25 м, в системе на 12-ч НИСЗ соответственно 7...25 м и 10...45 м. При обработке наблюдений четверок НИСЗ и
Таблица 19.1
Минимальные конфигурации сетей НИСЗ при различных периодах обращения в 3-орбитной системе
Т, ч | 3-кратное покрытие | 4-кратное покрытие | Т. ч | 3-кратное покрытие | 4-кратное покрытие |
Угол возвыше | ния, не менее | Угол возвыше | ния, не менее | ||
5 deg; 10 deg; 15 deg; | 5 deg; 10 deg; 15 deg; | 5 deg; 10 deg; 15 deg; | 5 deg; 10 15 deg; |
5 6 7 8 9 10 11 12 13 14
7 6 6 6 6 6 6 6 6 6
15 9
9 8 7 7 7 7 7 6 6 6
21 12 10
15 16 17 18 19 20 21 22 23 24
6 6 6 6 6 6 6 6 6 6
Долгота
Широта
20 deg;
40 deg;
60 deg;
80 deg;
7 = 8 u
0 deg;
20 deg;
40 deg;
60 deg;
7=12 ч
0 deg;
20 deg;
40 deg;
60 deg;
80 deg;
100 deg;
120 deg;
140 deg;
160 deg;
180 deg;
200 deg;
220 deg;
240 deg;
260 deg;
280 deg;
300 deg;
320 deg;
340 deg;
7,4 7,6 8,2
10,4 6,5
19,2 7,6
10,2 6,4 7,8 8,3 7,6 7,6 8,4 7,8 7,3 9,1 8,4
9,3 12,3 10,6 9,3 7,2 7,0 10,6 7,9 10,6 10,2 6,0 6,2 9,5 10,2 14,4 7,7 9,0 6,8
10,0 10,7 10,1 12,4 9,4 6,6 10,0 31,8 40,8 10,4 7,2 8,0 11,2 10,1 8,0 9,8 8,8 9,1
9,4 9,5 9,2 9,5 7,6 7,4 9,0 31,0 37,1 9,2 7,4 7,6 9,5 9,0 9,5 7,4 12,2 13,3
7,2 7,7 8,4 9,2
10,0 5,8 5,8 5,7 5,7 6,4 6,8 6,8
11,2 8,6 7,8 7,2 6,8 6,4
1026,2 9,2 13,2 9,2 6,6 8,3 7,2 9,2 6,8
1072,2 9,2 13,2 9,3 6,6 8,3 7,2 9,2
36,8
12,0 8,9 8,9
19,8 8,1 9,4 9,3
13,2
10,0 7,5 7,8
10,6 6,9
56,0
56,0 8,2
11,2 6,8
24,0 9,6 9,6 55,9 9,4 10,3 24,5 9,5 18,1 10,2 8,8 9,5 9,2 27,1 27,4 71,8 7.2 16,4
19,3 18,3 24,5 12,7 11,8 12,2 9,0 23,0 10,0 9,1 7,3 7,6 8,2 9,7 76,9 9,0 7,5 7,4
8,4 7,6 7,0 6,8 6,8 7,2 7,6 8,3 9,0 9,7 10,3 10,8 11,0 11,2 15,0 10,6 10,0 9,2
Таблица 19.2
Среднеквадратическая погрешность определения координат места, м
неблагоприятном (близком к компланарному) взаимном расположении потребителя и НИСЗ ошибки навигационных определений возрастают. Так, для рассматриваемого момента времени ошибки определения координат соответственно возрастают по месту до 100... 1000 м, по высоте до 130 м.
0,8 0,6 0,1* 0.2
8ч | ||||||||
10 15 20 25 6г, laquo;
О 10 15 20 25 J0 J5 U0 бв,м
40 4-5б,,нс
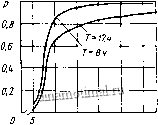
Рис. 19.1. Распределение ошибок места (а), высоты (б) и поправки к ШВ потребителя (в) в системах 3X7X8 и ЗХбХ 12
Показанные в табл. 19.2 поля точностей достаточно сложно использовать для вынесения суждения о сравнении точностных свойств анализируемых конфигураций.
Представим данные о точностных свойствах этих систем в виде интегральных распределений точностей. Из графиков на рис. 19.1 видно, что система из трех орбит с периодами 8 ч, по семь НИСЗ на орбите (3X7X8) точнее, чем система из трех 12-ч орбит по шесть НИСЗ на орбите (ЗХбХ 12). Это объясняется, скорее, меньшим числом НИСЗ, чем изменением высоты орбиты. Уместно отметить, что, как следует из сравнения кривых на рис. 19.1, а и б, геоцентрическая высота по обеим системам определяется с меньшей точностью, чем место в плане. Обе сравниваемые системы имеют довольно обширные области ухудшенной точности.
Для повышения точности навигационных определений во всех районах целесообразно увеличить число НИСЗ по сравнению с минимально необходимым. Рассмотрим точностные свойства системы ЗХ8Х 12 [139].
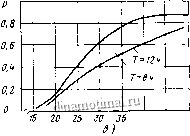
Из интегральных кривых для распределения ГФ [143] (рис. 19.2) видно, что ГФ Гпи измерения поверхностных координат с большой вероятностью не превышает 4 {р = 99 %). Как и ранее, пространственные координаты определяются по рассматриваемой системе с большими погрешностями, чем поверхностные, причем существен вклад погрешности определения высоты, которая примерно вдвое превышает погрешность места.
Нередко в процессе навигационных определений П проводит обсервацию по четырем laquo;наилучшим raquo; НИСЗ системы laquo;Навстар raquo;
- ви | ||||
-г deg; , | ||||
0.2 О
Рис. 19.2. Интегральные кривые распределения ГФ в системе laquo;Навстар raquo;. Каждый НИСЗ виден под углом 5 deg; над горизонтом
90 80 70 SO 50
30 10
1 4} | ||||
/ 1ч 1 l | ||||
2,0 2,5 3,0
3.5 кО /пи
Рис. 19.3. Распределение ГФ при определении пространственных координат при обсервациях по оптимальной четверке НИСЗ laquo;Навстар raquo;
[139, 140], таким, которые обеспечивают наименьшее значение суммарного ГФ из всех возможных созвездий по четырем НИСЗ, составляемых из видимых НИСЗ. Не останавливаясь на способах выбора наилучшего созвездия (см. гл. 25), приведем интегральные кривые распределения ГФ при проведении обсерваций по четырем НИСЗ (рис. 19.3). Из рис. 19.2 и 19.3 следует, что обсервации по наиболее информативной (в данный момент времени) четверке НИСЗ не приводят к существенной потере точности по сравнению со случаем, когда обсервация проводится по всем видимым НИСЗ. Среднеквадр этическое значение ГФ Гп при усреднении по времени и по поверхности земного шара при работе по laquo;наилучшему raquo; созвездию из четырех НИСЗ составляет 2,60. Соответствующие среднеквадратические значения ГФ Г и Г? , характеризующие погрешности определения координат в горизонтальной плоскости и поправку к шкале времени, составляют 1,45 и около 1,20. Если погрешность измерения (см. гл. 16) 3,2...13,1 м (1а), то ожидаемые оценки погрешностей определения пространственных координат 8,3...34,1 м, поверхностных координат 4,6... 19,0 м, времени 13...32 не. Все эти значения легко получить, ум[южая значение соответствующего ГФ иа погрешность измерения.
Рассмотренные примеры оценки точностных характеристик ССРНС относились к таким их структурам, которые обеспечивают глобальное навигационное обслуживание П. Наряду с этим в ряде практических приложений представляют интерес те структуры СРНС, которые обеспечивают навигационное обслуживание лишь в ограниченной области земного шара [48, 152],- так называемые региональные СРНС. Эти системы могут строиться на базе либо стационарных, либо высокоэллиптических НИСЗ, либо их комбинации. 278
Таблица 19.3 Значения ГФ в системе из
Таблица 19.4
Значения ГФ в системе из эллиптических НИСЗ
НИСЗ | Число види- | Г ср | |||
мых НИСЗ | |||||
Число види- | |||||
мых НИСЗ | 19,2 | 27,9 | |||
16.6 | 37,5 | ||||
31,6 | 56,3 | ||||
13,5 | 19,5 | ||||
Примеры оценки точности региональных СРНС, опирающихся на сеть стационарных НИСЗ, приводились в гл. 18 при рассмотрении элементарных созвездий. Примеры систем, использующих высокоэллиптические НИСЗ, можно найти в [117, 194]. Здесь же рассмотрим систему на базе эллиптических НИСЗ [56] и двух стационарных НИСЗ.
Средние значения и СКО геометрического фактора Г? raquo; в зонах, где наблюдатель имеет возможность определяться по 3...6 НИСЗ, приведены в табл. 19.3, данные которой дают представление об изменении точностных свойств системы с изменением видимого числа НИСЗ. Усреднение проведено как по времени, так и по всей поверхности с данной кратностью покрытия. Чтобы иметь возможность сравнивать полученные характеристики, приведем аналогичные данные для системы, состоящей из 16 НИСЗ на высокоэллиптических орбитах (табл. 19.4).
Данные табл. 19.3 и 19.4 показывают, что с увеличением числа наблюдаемых НИСЗ точность навигационных определений сначала увеличивается резко, а затем вест,ма медленно, так что едва ли целесообразно проводить навигационные определения но всем ви.аимым НИСЗ в зонах, где число их велико. Бо,льшое значение СКО Гп от среднего значения при малом числе видимых НИСЗ свидетельствует о наличии в зоне действия системы областей, где точность навигационных определений резко падает. Наличие таких областей нежелательно, поэтому большое значение Ор может характеризовать качество выбранной структуры сети НИСЗ. В частности, применительно к двум последним конфигурациям можно утверждать, что они неудачны. Специально вопрос о выборе сети НИСЗ системы по точностному критерию рассматривается в гл. 25.
19.4. ТОЧНОСТЬ ОЦЕНКИ СКОРОСТИ ДВИЖЕНИЯ
Скорость по данным ССРНС можно определить, например, путем нахождения производной от соответствующей координаты по времени. Однако точность этого способа невысокая, поэтому в ССРНС он не находит широкого применения. В этих системах принят способ оценки скорости, основанный на измерении доплеровского смещения несущих частот навигационных сигналов. Высокая точность определения составляющих скорости обеспечивается благодаря использованию диапазона СВЧ, что позволяет измерять радиальную скорость с погрешностя.ми не более 1,5...6 см/с [139]. Как правило, частота эталонного генератора П, относительно которой производятся измерения доплеровских сдвигов частот принимаемых сигналов, известна с точностью, недостаточной для прецизионных определений составляющих
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 [ 45 ] 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 |




