 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Радионавигационные системы, спутниковая радионавигация
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 [ 46 ] 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67
Таблица 19.5
Погрешность определения скорости по системе laquo;Навстар raquo;
Погрешность измерении, г, см/с | Погрешность, см/с | Вероятность, % | |
горизонтальная | вертикальная | ||
2 2 3 | 2 3 5 | 50 67 90 | |
7 9 13 | 8 13 21 | 50 67 90 | |
ного созвездия. В гл. 25 будут получены выражения для полуосей корреляционного эллипсоида по высоте и в плане соответственно:
скорости. Поэтому значение поправки по частоте q включается в состав неизвестных подобно тому, как это делалось при определении координат с поправкой к бортовой шкале времени (БШВ). Определяемый вектор состояния в этом случае q\=\\Vx,Vy,v rf\\.
Нетрудно убедиться, что влияние геометрии на соотношение между погрешностями измерения радиальной квазискорости и определения скорости П полностью аналогично соотношению между погрешностями измерения квазидальности и определения координат П. Это является следствием того, что производная от квазидальности по некоторой координате, входящая как элемент в матрицу наблюдений С, равна производной от радиальной квазискорости по соответствующей состав.,1яющей скорости.
Таким образом, все выводы о точностных свойствах систем применительно к определению координат по измеренным квазидальностям остаются в силе и для определения скоростей по измерениям квазидоплеровских сдвигов частот. Порядок погрешностей определения скоростей иллюстрируется табл. 19.5 [139].
19.J. ОЦЕНКА точности ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ К А
Использование сетевой СРНС позволяет получить высокоточную навигационную засечку по положению и скорости низкоорбитального КА. Для таких КА число видимых НИСЗ будет больше, чем для околоземных объектов. Это объясняется, по-первых, отсутствием ограничения по углу места, вызванного ионосферной и тропосферной рефракцией, а во-вторых, возникающей здесь новой возможностью наблюдения НИСЗ из-под горизонта. В таком случае вероятность выбора рабочего созвездия НИСЗ по точностным характеристикам, близкого к оптимальному, возрастает.
Примем поэтому в качестве потенциальной оценки точности навигационной засечки ее точность при использовании идеаль-
ap = (2/-V3) (Т. (1-cos 9) (Т, = Oz = V273 Or (sine)
(19.3)
(Ар, At, А2 - поправки к расчетному положению по геоцентрическому радиусу, вдоль орбиты и по боковому направлению, а 9 - сферический радиус зоны радиовидимости КА).
Примем в качестве исходных значения, рассчитанные для сети НИСЗ с периодом Т = \2 ч и условий наблюдения, характерных для приземного подвижного П (наблюдения в верхней полусфере). Тогда нормированные погрешности навигационной засечки по положению будут:
(Тр/(т.= 1,62; о,/а.= (т,/(т. = 0,85. (19.4)
Из геометрического подобия погрешностей оценок положения и скорости П (см. гл. 25) следует, что аналогичные оценки I будут иметь место для погрешностей навигационной засечки по скорости:
lt;т уо,=: 1,62; lt;т уо; = о.уо = 0,85. (19.5)
Можно показать, что в этом случае порядок погрешности
i прогноза будет определяться вековым членом в аргументе широты [26]:
Ат~ -ЗХ lt;Аро + Аи,о/Пср), (l 6)
где Ах - возмущение в положении КА, обусловленное погрешностями оценки начальных значений геоцентрического радиуса Аро и скорости по касательной к орбите АУто, laquo;ср - угловая скорость КА, Я, - долгота в орбите.
Из формулы (19.6) с использованием (19.4) и (19.5) получаем оценку точности прогнозирования через точность однократной навигационной засечки: (т laquo;6л/гcp( lt;Tp + o т/гcp)np
Для низкоорбитного кругового КА с высотой Я = 300...400 км угловая скорость его обращения (его среднее движение) ПсрЮ с Отсюда следует важный результат сопоставимости точностных свойств дальномерного и радиально-скоростного методов. Для соизмеримости влияния точностей измерений дальности и радиальной скорости на точность определения наиболее критичного из параметров орбитального движения необходимо потребовать, чтобы а - я;2Пср lt;Тг. Если это условие не выполняется, то определение орбиты не может быть достаточно точно выполнено по одномоментной засечке положения и
скорости КА и необходимо наблюдение движения на определенном мерном интервале. Подчеркнем, что высказанное утверждение справедливо лишь при условии, что систематические ошибки модели согласованы с погрешностями измерений.
При условии равноточности измерений в указанном выше смысле необходимость в организации мерного интервала будет возникать тогда, когда требуемая точность прогноза на заданном интервале не может быть обеспечена точностью оценки критического параметра по одномоментной засечке из-за случайных или систематических ошибок. Точность определения остальных параметров движения должна иметь такой же порядок, как и требуемая точность прогноза, и определяться точностью засечки.
ГЛАВА 20
ДИФФЕРЕНЦИАЛЬНЫЙ РЕЖИМ ССРНС
20.1. НЕОБХОДИМОСТЬ ДИФФЕРЕНЦИАЛЬНОГО РЕЖИМА
Несмотря на достаточно высокую точность навигационно-временного обеспечения (НВО), подтвержденную при испытаниях систем laquo;Глонасс raquo; и laquo;Навстар raquo;, развернулись работы, направленные на повышение точности и устойчивости функционирования этих систем. Одно из таких направлений связано с реализацией измерений псевдодальности по фазе несущей частоты, другое - с вводом дифференциального режима (ДР) - режима дифференциальных навигационных определений. Внимание к ДР связано непосредственно со стремлением восстановить точность навигации в нештатных условиях функционирования, вызванных нарушением работы подсистемы КИК, необходимостью обеспечивать решение задач, требующих точностей выше 10 м, а также стремлением гражданских потребителей повысить точность навигации, обеспечиваемую предоставляемым им кодом CjA.
Проведенные к настоящему времени теоретические и экспериментальные исследования дифференциального метода (ДМ) дали обнадеживающие результаты и выявили его перспективность, в результате чего начались работы по реализации ДР.
Эти работы стимулировались предпосылками разнообразного характера.
Прежде всего действовала общенавигационная традиция списывать накапливающиеся ошибки счисления в точках, координаты которых известны с более высокой точностью. Определенное влияние на становление ДР в ССРНС оказали разработки по использованию ДР в фазовой радионавигационной системе laquo;Омега raquo;, где сильнокоррелированные погрешности фазовых измерений, связанные с влиянием условий распространения сверхдлинных волн, частично устраняются вводом корректирующих поправок, которые определяются на специально предусмотренных контрольных станциях (КС), привязанных по координатам с помощью геодезических средств.
Существенное значение имели исследования точностных свойств сетевых СРНС, которые выявили (и по результатам математического моделирования,
и по данным натурных экспериментов) наличие пространственной и временной корреляции составляющих погрешности местоопределения. Результаты подобных исследований непосредственно подсказывали путь к повышению точности НВО - нахождение систематических погрешностей на КС и использование их как поправок в АП.
Значительным стимулом к продолжению исследований послужили обнадеживающие результаты апробирования ДР при заходе самолетов на посадку. Условия испытаний, когда и КС, и самолет со спутниковой аппаратурой находились в ограниченном пространстве, где действует сильная корреляция погрешностей, позволили продемонстрировать высокую эффективность ДР й повышение точности до 2...3 м.
Заметное влияние оказали также изыскания по использованию псевдоспутников* для испытаний АП на полигоне. Это было вызвано стремлением испытать аппаратуру в условиях слаборазвитой сети НИСЗ, когда одними орбитальными передатчиками не удается сформировать хорошее созвездие и необходимо привлекать излучатели, установленные на Земле, а также стремлением восполнить созвездие тогда, когда местные препятствия на испытательном полигоне заслоняют излучение какого-либо орбитального передатчика. Работа с псевдоспутниками показала, что они могут выполнять вполне определенные функции по формированию корректирующей информации и передаче на борт потребителя необходимых для дифференцциальной коррекции сигналов.
Энергичное развитие ДМ стимулировали потребности гражданской авиации в точном навигационном обеспечении по сигналам системы laquo;Навстар raquo;. Эта система заказана МО США, поэтому предусмотрено ограничение числа потребителей, пользующихся сигналом с точным кодом Р, только военными объектами. Всем остальным потребителям, в том числе самолетам и вертолетам гражданских ведомств, предоставляется возможность использовать код С/Л, что, как планируется, после развертывания системы даст точность 2а= 100 м. Поэтому очевидно стремление повысить точность с помощью ДР.
20.2. СТРУКТУРА ДИФФЕРЕНЦИАЛЬНОЙ ПОДСИСТЕМЫ
Для реализации ДР необходимо дополнить систему рядом технических средств, совокупность которых можно рассматривать как своеобразную подсистему. Эта дифференциальная подсистема (ДПС) не влияет на функционирование системы в основном, стандартном ее режиме, однако предоставляет потребителю возможность перейти при необходимости на работу в ДР.
В основе ДМ лежит формирование разности отсчетов, что и придало методу название - дифференциальный.
Структура ДПС поясняется рис. 20.1, где изображено рабочее созвездие из четырех НИСЗ, выбранное потребителем как оптимальное для выполнения им НВО в стандартном режиме. Собственно ДПС образуют средства наземной контрольно-корректирующей станции (ККС) и дополнительные бортовые устройства потребителя. На ККС размещены: АП системы, способная в результате накопления измерений и фильтрации случайных погрешностей обеспечить наиболее точные НВО;
* Наземный передатчик, излучающий сигнал, подобный навигационному сигналу системы. В литературе встречается также название laquo;псевдолит raquo;, образованное из начала и конца слова laquo;псевдосателлит raquo;.
нисз-z
нисз-j
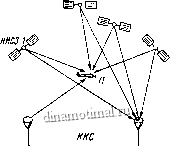
нисз-и
Передатчик КИ | Форпики | Точная АП | |||
Истинные | |||||
координаты ККС
Рис. 20.1. Структура дифференциальной подсистемы:
ККС - контрольно-корректирующая станция; КИ - корректирующая информация
формирователь корректирующей информации (КИ), вычисляющий поправки на сильнокоррелированные погрешности и формирующий кадр КИ; передатчик КИ. На борту потребителя размещаются: аппаратура приема КИ и устройство ввода КИ в стандартную АП. Антенна АП, размещенной на ККС, привязывается на местности с геодезической точностью. В дифференциальном режиме на борту потребителя результаты определений в стандартном режиме будут автоматически корректироваться с помощью переданных с ККС поправок. Поскольку ККС имеет ограниченную зону действия, на обеспечиваемой территории размещается ряд таких станций, каждой из которых потребитель пользуется в зоне уверенной передачи ею КИ. Должны быть предусмотрены меры для своевременного перехода АП на прием КИ от очередной станции.
При развертывании ДПС естественно стремление к использованию уже имеющихся каналов связи. Поэтому в интересах различных потребителей могут быть задействованы различные средства связи, что придает ДПС многоведомственную специфику. В англоязычной литературе глобальная система GPS ( laquo;Навстар raquo;), дополненная ДПС, получила название DGPS (Differential Global Positioning System).
Контроль целостности и контроль достоверности передачи КИ. Основные функциональные элементы ДПС должны дополняться устройствами, решающими вспомогательные задачи: контроль целостности СРНС и контроль достоверности передачи КИ.
Под целостностью понимают способность СРНС предоставлять потребителю полноценное навигационно-временное обеспечение. Средства СРНС, обладающей высокой целостностью, в любой момент времени доступны потребителю для проведения высокоэффективного навигационного сеанса. Говоря о целостности системы или целостности радионавигационного поля, имеют в виду нормальную, штатную работу каждого из НИСЗ системы. В свою очередь, целостность обеспечивается исправной работой бортового радиокомплекса НИСЗ, штатным функционированием НКУ (снабжающего НИСЗ эфемеридами, ЧВП и альманахом),
ВЫСОКОЙ достоверностью передачи по командно-программной радиолинии на борт НИСЗ массива служебной информации.
В кадре сигнала системы laquo;Глонасс raquo; (см. гл. 10) передается признак В , характеризующий работоспособность бортового источника навигационного сигнала (БИНС), и интегральный признак работоспособности спутника С . Однако признак Вп охватывает лишь одно звено СРНС, а признак С отражает ситуацию, имевшую место более 12 ч тому назад. Необходима более оперативная система контроля целостности, созданием которой в настоящее время занимаются как со стороны laquo;Глонасс raquo;, так и со стороны laquo;Навстар raquo;.
Возможно решать эту задачу путем автономного контроля целостности на борту потребителя, применяя алгоритмы, использующие избыточную измерительную информацию. Такой прием полезно предусматривать и для стандартного, и для дифференциального режимов. Однако в ДР появляется дополнительная возможность: формировать оценки целостности в наземных средствах ДПС, и прежде всего в ККС. Если обнаруживается нарушение целостности, по каналам передачи КИ передается соответствующее уведомление, которое потребитель способен реализовать немедленно.
Потребитель корректирующей информации должен иметь гарантию того, что он получает правильные поправки. Для этого нужно контролировать достоверность принимаемой КИ. Для контроля достоверности в поле передатчика КИ можно расположить вынесенный приемный пункт, координаты которого заранее определяются с высокой точностью. Если на этом пункте проводить навигационный сеанс по спутниковой РНС и одновременно вносить поправки, полученные от ККС, можно по сопоставлению скорректированных координат с априорно известными определить качество КИ, о чем незамедлительно будет сообщено на ККС.
Вынесенный приемный пункт будет выполнять функции контрольной станции. На него же вполне возможно возложить рещен laquo;е также и задачи контроля целостности.
Таким образом, в состав ДПС должно дополнительно входить устройство контроля целостности СРНС и достоверности передачи КИ.
20.3. МЕТОДЫ ДИФФЕРЕНЦИАЛЬНЫХ ОПРЕДЕЛЕНИЙ
Основы дифференциальной методики в СРНС. Дифференциальными методами НВО можно назвать методы определения координат, составляющих скорости и времени потребителя (его вектора состояния ВС) по результатам приема и обработки сигналов ССРНС в двух разнесенных точках ее рабочей зоны. Одна из этих точек - место расположения АП, координаты
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 [ 46 ] 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 |




