 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Радионавигационные системы, спутниковая радионавигация
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 [ 47 ] 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67
которой уточняются, вторая - место расположения аппаратуры приема и обработки сигналов, обеспечиваюш,ей формирование КИ для уточнения координат потребителя. Вторая точка эталонируется в результате ее привязки на местности с геодезической точностью и размещения там наиболее точной АП. Совокупность средств, размещенных в эталонируемой точке, образует ККС.
Дифференциальный метод используется для уменьшения погрешности определения координат потребителя по сравнению с погрешностями, имеющими место при стандартом методе НВО, путем исключения сильнокоррелированной их части. Считается, что сильнокоррелированные в двух точках рабочей зоны погрешности обусловлены проявлением эфемеридных погрешностей НИСЗ, уходом его ШВ и влиянием распространения сигналов в ионосфере и тропосфере. Поскольку на эталонированной ККС путем сопоставления ее координат, определенных по сигналам ССРНС, с априорным их значением можно выявить систематическую погрешность, то такую же систематическую погрешность можно приписать и координатам, определенным потребителем. Если потребителю сообщить с ККС значение соответствующей поправки, он сможет скорректировать результаты своего навигационного определения. Для передачи КИ используется тот или иной канал связи.
Очевидно, что эффект от применения ДМ будет зависеть от того, насколько одинаковыми окажутся погрешности на ККС и в точке нахождения потребителя в те моменты, когда на его борту производятся спутниковые навигационные определения, т. е. от степени пространственной и временной корреляции погрешностей. При сильной корреляции систематическая часть погрешности будет исключаться практически полностью, при слабой выявится остаточная погрешность.
Было предложено и проанализировано много различных вариантов ДМ, различающихся по ряду призь-чков, основными из которых являются: характер корректируемой в АП информации; способ передачи КИ с ККС потребителю.
По характеру корректируемой в АП информации можно различать ДМ с коррекцией определяемого ВС (в частности, координат потребителя и его скорости) и с коррекцией навигационного параметра, измеряемого в АП (псевдодальность, псевдоскорость).
По способам передачи КИ образуются варианты, зависящие от выбора канала связи.
Рассмотрим основные варианты ДМ.
Метод коррекции координат. Данный метод предполагает, что корректируются координаты потребителя, определенные им по сигналам НИСЗ, при стандартном режиме использования ССРНС. Корректирующая информация формируется на ККС (координаты
Аппаратура потреВителя
Прд НИ
Вычислитель модилятор попрадок
Аппаратура потребителя
Коррентор координат
Прм НИ
Демодулятор
Рис. 20.2. Структурная схема, поясняющая метод коррекции координат
фазового центра антенны которой заранее известны с высокой точностью) путем сопоставления эталонных координат с координатами, вычисленными в результате стандартного навигационного сеанса, проводимого на ККС с помощью АП наивысшего класса точности. Полученные дифференциальные поправки (как разности истинных и измеренных координат ККС) передаются в составе КИ потребителю, который и уточняет по ним свои координаты.
Алгоритм этого метода (рис. 20.2) может быть записан в виде: ДХ = Хсэ-Хкс; Хп = Хп + АХ, (20.1)
где Хцс, п - векторы оценок координат ККС и потребителя по сигналам ССРНС; Хсэ - вектор эталонных координат ККС; АХ-вектор поправок; Хп-вектор уточненных координат потребителя.
Метод ввода поправок в координаты сравнительно прост, так как не меняет основного алгоритма навигационных определений потребителя, но ему свойствен существенный недостаток - ограничение дальности действия. Дело в том, что потребитель использует обычно НИСЗ, образующие наивыгоднейшее по геометрии созвездие (так называемое оптимальное созвездие), вследствие чего и ККС должна использовать такое же созвездие. Поправки, вычисляемые на ККС, относятся к ее оптимальному созвездию, но тогда и все потребители в зоне могут пользоваться этими поправками, если сами работали по тому же оптимальному созвездию. Это можно обеспечить при небольших расстояниях между ККС и потребителем. По мере удаления потребителя от ККС созвездие, оптимальное для нее, перестает быть таковым для потребителя, а на определенных расстояниях некоторые НИСЗ из него вообще не будут находиться в зоне радиовидимости потребителя. В то же время переносить поправки, найденные по одному созвездию, на результаты
определений, полученные по другому, явно недопустимо, так как это может даже ухудшить точность.
Преодолеть отмеченный недостаток можно, если не требовать, чтобы и ККС, и потребитель пользовались одним и тем же созвездием.
Метод коррекции навигационных параметров. Идея метода состоит в том, чтобы сообщить потребителям набор поправок к результатам измерений по всем НИСЗ, которые потенциально могут быть использованы потребителем, предоставив тем самым возможность каждому выбирать наивыгоднейшее для него созвездие.
На ККС вычисляются поправки к измеряемым параметрам (например, к псевдодальности) по всем НИСЗ, находящимся над ее радиогоризонтом. Для этого на ККС измеряют псевдодальности до всех радиовидимых НИСЗ и одновременно по эталонным координатам станции находят их расчетные значения, которые принимают за истинные дальности. Разности расчетных и измеренных значений передаются в составе КИ всем потребителям. Каждый потребитель выбирает оптимальное для него созвездие и корректирует измеренные им псевдодальности с помощью поправок, относящихся к используемым им НИСЗ. По скорректированным результатам измерений в АП решается навигационная задача.
Алгоритм данного метода (рис. 20.3) можно записать так: Аг,- = гксы - ha; гщ = гп; + Аг,-; [ Гп i, , Гш] Хп, (20.2)
где rQ , Гр - псевдодальности, измеренные на ККС и потребителем; гксэ, -- эталонные псевдодальности для ККС; Аг, - поправки к псевдодальностям; Гп; - уточненные псевдодальности для потребителя.
Пр9 КИ
Аппаратура потребителя | Модуля -тор | ||
Вычислитель параметра | Вычислитель поправок | ||
/ кс | |||
f кСз1 1 Хэф |

Аппаратура | Корректор | |
потребителя | параметра |
Прм КИ | Демоду- | |
ляшор |
Рис. 20.3. Структурная схема, поясняющая метод коррекции навигационного параметра
Вариантом данного метода является вычисление поправки к измеряемому параметру самим потребителем, использующим для этого передаваемые с ККС ее эталонные координаты и набор измеренных псевдодальностей, а также извлекающим данные об эфемеридах НИСЗ из их сообщений, которые декодируются в процессе проведения потребителем навигационного сеанса.
Возможен и такой вариант метода, когда ради уменьшения объема КИ с ККС передаются поправки не к дальномерному параметру, а к разностно-дальномерному, что обязывает потребителя также проводить разностно-дальномерные измерения.
Метод разностной коррекции навигационного параметра. При использовании рассмотренных методов предполагалось, что потребителем навигационная задача решается полностью: либо до использования КИ (метод коррекции координат), либо после внесения поправок (метод коррекции навигационного параметра). При этом обязательно ведется точный расчет координат НИСЗ, для чего из служебного сообщения, содержащегося в кадре сигнала, извлекается эфемеридно-временная информация. Необходимые для этого вычислительные затраты усложняют матобеспечение АП по сравнению с матобеспечением стандартного режима его использования, что удорожает АП.
Для гражданских потребителей первостепенное значение имеет удешевление АП, поэтому понятно стремление упростить решения навигационной задачи на борту потребителя, например, отказавшись от расчета координат НИСЗ и применив простые линейные преобразования. Такая возможность появляется, если с ККС сообщать потребителю направляющие косинусы радиолинии НИСЗ-ККС, а также измеренные псевдодальности и при необходимости - пространственные координаты и поправку к ШВ ККС.
Данный метод применим в малой зоне вблизи ККС. При близком расположении станции и потребителя достигающий их фронт волны от НИСЗ можно считать плоским, и тогда радиолинии НИСЗ-ККС и НИСЗ- потребитель будут задаваться одинаковыми направляющими косинусами. Известно, что в этом случае (рис. 20.4) разность дальностей от одного и того же НИСЗ до ККС и потребителя Ar = rKQ -rpj может быть связана с разностью координат ККС и потребителя через соответствующие направляющие косинусы. При определении четырехмерного ВС Q(x, у, г, t) по Л НИСЗ можно связать Л/-мерный вектор приращений псевдодальностей tR с четырехмерным вектором приращений координат AQ матрицей размерности (Л/Х4), содержащей направляющие косинусы (от угла места Ь и азимута А):
cos copy;, созЛ, CO.S copy;, ьтА,
sin copy;,
sin copy;
(20.4)
cos copy;, созЛд, соз copy;д, %mAf, в виде
AQ = (G G) CAR.
В геометрической матрице (20.3) столбцы задают коэффициенты по широте, долготе, высоте и времени.
Рис. 20.4. Диаграмма, иллюстрирующая принцип разностной коррекции навигационного параметра
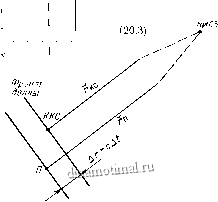
Зиая G и измерив R, можно с помощью простых преобразований (20.4) найти ДО, а стало быть, и местоположение потребителя относительно ККС, а также расхождение их ШВ.
Важно обратить внимание на то, что при формировании разностей псевдодальностей AR = r ;(; -гп все сильиокоррелированиые погрешности измерений будут исключаться, в че.м и проявится дифференциальный эффект*.
При реализации этого метода иа ККС в какие-то моменты измеряют псевдодальиости для всех НИСЗ и вычисляют их направляющие косинусы. Эта информация передается потребителю, который также проводит измерения по НИСЗ, образющим оптимальное созвездие. Образуя относящиеся к данным НИСЗ разности rQi - Гп,-, потребитель вычисляет приращения своих координат относительно координат ККС, т. е. находит свое относительное местоположение. Если потребитель получает от ККС и ее координаты, он может непосредственно найти свои координаты в используемой системе отсчета.
Отметим, что вместо псевдодальиостей можно оперировать временами прихода сигналов НИСЗ соответственно к ККС и к потребителю, тогда разность времен At прихода выступит в качестве измеряемого (разностного) параметра.
Модификация основных методов. Варьируя состав передаваемой с ККС информации, содержание решаемых потребителем задач, способы формирования и передачи КИ, можно получить ряд модификаций основных ДМ.
Прежде всего укажем на ДМ с использованием псевдоспутников. В этом варианте иа ККС применяется передатчик, подобный передатчику НИСЗ, который излучает стандартный навигационный сигнал. В кадр сигнала дополнительно заложена КИ. Достоинством такого ДМ является то, что для передачи потребителю КИ нет необходимости в дополнительной связной аппаратуре. Кроме того, псевдоспутиик выступает как дополнительная наземная навигационная точка, относительно которой потребитель может выполнять измерения. Такой laquo;заземленный raquo; НИСЗ находится постоянно в распоряжении потребителя, пребывающего в рабочей зоне ККС, а измерения по нему могут улучшить геометрию навигационного сеанса. Несмотря иа недостатки, обусловленные возможностью приема сигналов псевдоспутиика только в пределах зоны прямой видимости, данный метод привлекает к себе внимание.
Интерес, проявляемый к разработке псевдоспутников для включения их в ДПС, связан с возможностями псевдоспутииков:
улучшать геометрию навигационного сеанса;
повышать надежность навигационных определений путем замены вышедшего из строя НИСЗ;
передавать КИ без привлечения дополнительной связной аппаратуры иа борту потребителя;
обеспечивать гарантированную точность навигационных определений при недостаточной развернугой орбитальной группировке НИСЗ путем установки псевдоспутииков в нужных районах;
предоставлять потребителю региональное средство контроля для оценки работоспособности АП.
Объем передаваемой с ККС информации может изменяться в зависимости от типа потребителя, что будет далее показано при рассмотрении содержания КИ.
Объем вычислений в АП может уменьшаться, если будет увеличен объем КИ, передаваемой с ККС. Так, метод с разностной коррекцией навигационных параметров, при котором ККС передает направляющие косинусы НИСЗ, можно реализовывать
* Поскольку в данном методе поправки как таковые ие oпpeдeJШЮтcя и не используются для коррекции, название laquo;метод с временной коррекцией raquo;, предложенный в [161], представляется недостаточно четким.
так, что с ККС будут передаваться и значения доплеровских сдвигов частот (в виде определенных коэффициентов), что упростит решение задачи захвата сигнала НЙСЗ, а также позволит сократить объем данных, извлекаемых из кадра сигнала.
20.4. КОРРЕКТИРУЮЩАЯ ИНФОРМАЦИЯ
Возможности практической реализации ДР в ССРНС laquo;Глонасс raquo; или laquo;Навстар raquo; определяются прежде всего возможностями передачи КИ от ККС к бортовой АП. В связи с этим большое внимание уделялось содержанию КИ, форме ее представления и каналам связи.
Американский специальный комитет морской радиотехнической комиссии SC-104, проводя работы в интересах морских, авиационных и прочих потребителей системы laquo;Навстар raquo;, создал в 1983 г. [177 три рабочие группы (по вопросам формата и данных кадра КИ; связного канала; псевдоспутников), которые возглавили опытные специалисты в области спутниковой радионавигации. Первая фаза исследований завершилась рекомендациями по набору стандартных кадров, по выбору диапазонов частот для связи ККС с потребителями и по конструкции псевдоспутников.
Рекомендуемый формат кадров КИ отличается от формата кадра системы laquo;Навстар raquo;, так как из-за различий в содержании длина формата кадров КИ переменная, тогда как формат кадра для стандартного режима системы постоянен. В то же время отмечается, что имеют место предпосылки для приведения формата кадров КИ к стандартизованному формату данных, передаваемых НИСЗ. Это обусловлено стремлением к унификации матобеспечения в основном режиме и в ДР, в том числе к единому алгоритму обнаружения ошибок (в основном кадре и в кадре КИ), а также целесообразностью использования в ДР хорошо проверенных и удобных алгоритмов основного режима.
При совместном использовании потребителями систем laquo;Глонасс raquo; и laquo;Навстар raquo; возникает естественный вопрос об унификации кадров корректирующей информации той и другой системы. Для ДПС laquo;Глонасс raquo; ее разработчиками предложен свой набор кадров, приближенный к формату кадра сигнала этой системы. Как и формат кадров КИ системы laquo;Навстар raquo;, этот формат отличается от основного формата своей системы. Таким образом, при различии основных форматов сигналов двух систем предложены различные форматы КИ, к тому же не совпадающие с основными форматами. В такой ситуации унификация матобеспечения оказывается непростой задачей, требуюидей совместной работы двух сторон в рамках программы SC-104. Исход таких объединенных усилий еще не ясен, поэтому целесообразно
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 [ 47 ] 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 |




