 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Радионавигационные системы, спутниковая радионавигация
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 [ 59 ] 60 61 62 63 64 65 66 67
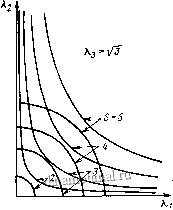
Рис. 25.2. Сравнение результатов применения критериев следа корреляционной матрицы и определителя для выбора рабочего созвездия
Расхождение их в других точках пространства эллипсоидов (Xt, Х2, Хз) иллюстрируется рис. 25.2, где показаны сечения первых критериальных поверхностей, отвечающих различным значениям Si, и сечения отвечающих этим же значениям вторых критериальных поверхностей V,- плоскостью Хз = = const. Рассмотрение этих зависимостей говорит о том, что для сильно вытянутых корреляционных эллипсоидов {Х,1 gt;Х,2, X,2 gt;i) критерий определителя может давать результаты, заметно отличающиеся от результатов по критерию S. Следовательно, такой выбор приведет к заметному проигрышу в точности. Поэтому приближенная эквивалентность рассмотренных критериев имеет место при условии исключения сильно вытянутых корреляционных эллипсоидов, т. е. при выборе только хороших созвездий, что обычно и имеет место на практике.
25.3. приближенный учет параллакса минимального созвездия
В общем случае выраж.ения для градиентов результатов навигационных измерений сложно зависят от параметров, определяющих взаимное положение наблюдателя и НИСЗ. Поэтому строгий и исчерпывающий анализ точностных характеристик обсервации доступен лишь при использовании численных методов. Однако можно получить простые приближенные зависимости, позволяющие качественно оценить точности обсервации в зависимости от наиболее существенных параметров. Рассмотрим такую возможность, обратившись к простейшему способу аппроксимации градиентов результатов дальномерных измерений. Этот способ обладает тем удобным свойством, что наиболее точен тогда, когда наблюдаются наибольшие погрешности обсервации. Подобное асимптотическое свойство предлагаемой аппроксимации позволяет использовать ее для оценки наиболее неблагоприятных случаев реализации точностных характеристик. Упрощение же, о котором говорится, касается приближенного учета влияния параллакса, обусловленного нецентральным положением наблюдателя, в результате чего конфигурация навигационного созвездия для П и из центра Земли будет выглядеть по-разному.
Введем понятие картинной плоскости, понимая под ней касательную плоскость к единичнвй сфере в точке, отвечающей местной вертикали объекта (полюс проекции). Очевидно, что при таком определении будет две картинные плоскости - геоцентрическая и топоцентрическая. Точная связь геоцентрического и топоцентрического зенитных углов, показанных на рис. 25.1, дается зависимостью tg9 = sinX,/{cosX, -/?з /рс).
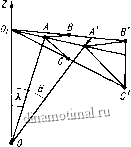
Рис. 25.3. Отображение геоцентрической картинной плоскости на топоцеитрическую картинную плоскость:
0Z - местная вертикаль; АБС - геоцентрическая конфигурация; АВС - топоцентрическая конфигурация
Отображение навигационной обстановки в стереографической проекции на обе эти полосы дает подобные картинки в достаточно малой окрестности полюса проекции. Соблюдение условия по.добия этих картинок особенно важно для упрощенного описания навигационной обстановки, так как позволяет свести по крайней мере качественно анализ точности в некоторой окрестности рабочей области, использующей
одну и ту же конфигурацию, к анализу одной конфигурации в геоцентрической картинной плоскости. Упомянутое условие подобия имеет, очевидно, вид
e~kX. (25.13)
Выясним более подробно, чему эквивалентно преобразование навигационной обстановки при переходе от геоцентрической точки зрения к топоцентрической при соблюдении условия (25.13).
Пусть на единичной геоцентрической сфере фиксирована точка, определяющая местную вертикаль, и некоторые три точки, достаточно к ней близкие. Строго говоря, речь идет об отображении некоторой окрестности полюса преобразоваиня единичной геоцентрической сферы в единичную топоцеитрическую сферу. Местная вертикаль играет роль полюса этого отображения. Заменим малые окрестности отображенных сфер соответствующими картинными плоскостями. Далее для удобства сравнения изображения совместим обе картинные плоскости. Тогда нетрудно видеть, что ААВС и ААВС (рис. 25.3) подобны. Коэффициент подобия k не зависит от положения и ориентации ААВС относительно полюса преобразования. Поэтому lt;ВЛС= lt;ВЛС, т. е. отображение конформное.
Изменение положения полюса Oi относительно ААВС приводит к тому, что преобразованный ААВС перемещается - транслируется, сохраняясь равным самому себе. Последнее, очевидно, означает неизменность точностных оценок, полученных по результатам измерений, выполняемых в соответствующих вершинах этого треугольника.
Границы справедливости изложенных соображений обусловлены пределами допустимости упрощенной аппроксимации преобразования. Допустимость аппроксимации smX~X и cos~l очевидна для достаточно малых значений X. Основное ограничение обусловлено пределом допустимости линеаризации tg9. Пусть 9 р - предельное значение. Тогда максимально допустимое смещение опорной точки от полюса будет J -Афпр- Отображение конфигурации НИСЗ на единичную сферу наблюдателя имеет смысл созвездия. Если точки созвездия разнесены не на максимально возможные расстояния, то полюс можно варьировать в области, представляющей собой общую часть кругов с центрами в точках конфигурации и радиусами J
Итак, путем перехода от изображения конфигурации НИСЗ на геоцентрической сфере к трансформированной параллаксом конфигурации (созвездию) на единичной топоцентрической сфере определяется область возможных перемещений полюса как пересечение кругов радиуса Аах с центрами в точках первообразной конфигурации.
в результате будет получена область, в которой сохраняется постоянство точностных характеристик, вытекающее из упрощенной теории.
25.4. КАЧЕСТВЕННЫЙ АНАЛИЗ ЗОН ПОНИЖЕННОЙ ТОЧНОСТИ
Теперь используем полученное упрощенное представление градиентов для объяснения снижения точности навигационных определений. Случаи пониженной точности обсервации имеют место при, казалось бы, номинальной работе, когда с определяющегося объекта наблюдаются четыре НИСЗ, однако выбранные не лучшим образом. Анализ показывает, что опасными в этом смысле являются области минимальной кратности покрытия и что эти области могут иметь место для номинальной системы в определенных сферических сегментах окрестностей узлов сети НИСЗ.
Рассмотрим поэтому случай обсервации по четырем НИСЗ и установим причину появления больших погрешностей. Будем считать, что измерения проводятся по двум НИСЗ из одной цепочки и по двум - из другой.
Упрощенное преобразование позволяет тотчас пересчитать геоцентрическую конфигурацию НИСЗ в созвездие, определенное в топоцентрической системе координат. Изображение единичных векторов п deg; п/- градиентов результатов дальномерных измерений в топоцентрической системе показано на рис. 25.4. Ось z направлена в точку пересечения больших кругов, соответствующих цепочкам НИСЗ. Пусть ф и X, - геоцентрические углы, характеризующие положения изображений НИСЗ каждой цепо чки. Соответствующие им топоцентрические значения фяф и Xkk.
Упрощенные выражения градиентов п?, п deg; в принятой системе координат позволяют рассчитать оценку нормированной погреш-
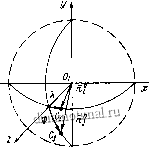
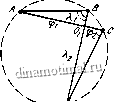
Рис. 25.4. Дальномерные градиенты в топоцентрической системе координат, связанной с узлом сети
- 2-
Рис. 25.5. Диаграмма, поясняющая геометрический смысл условия ф1ф2 = = Я1Я,2. Топоцентрическая картинная плоскость связана с углом сети точкой О,
ности обсервации а (SpK,) выражаемую через объем и сумму квадратов площадей граней призмы, построенной на Обобщенных градиентах. Искомый объем
К = G, ( 02 X Оз) = g, (g2 X ga)/2а.
Подстановка сюда значений разностных градиентов дает gi(g2Xg3) laquo;0,5(2 -i) (ф2 - lt;i.i) (ф1ф2 -iAi2). Условие 1/=0, следующее из соотношения \/к\ = к2/2, означает, что изображения всех четырех НИСЗ лежат на. одном круге топоцентрической сферы. Изображение, имеющее место в данном случае в картинной плоскости, иллюстрируется рис. 25.5.
Итак, полученный важный результат объясняет причины появления бесконечно больших погрешностей обсервации. Необходимым и достаточным условием появления больших погрешностей служит условие видимого расположения НИСЗ на одном круге, в сечении плоскостью единичной сферы наблюдателя.
Сумма квадратов граней призмы, построенной на обобщенных градиентах 2 = (G, X 02)4(0, X Оз)Ч(02Х Оз), после пренебрежения членами более высокого порядка малости представляется следующей приближенной зависимостью:
2~(2а*) [ф,(Л2-А:,) +(Я2- gt;:,) + (-ф,) +
+ Я,(Я2 - ,) (ф2 - ф,) - ф, ф2(Я2 - я,)
Оценка точности навигационной засечки, как указывалось,
имеет следующий общий вид: а~( Sp К,) = а~S/I И- Вместо координат ф X характеризующих угловое положение НИСЗ на единичной сфере наблюдателя, используем новые координаты:
ф, = g-M,/2, = + /гА,/2, , 1, =т]-М2/2, Х2 = г1 + /гД2/2,
где 1,ц - координаты середины пар НИСЗ, А - угловые рас-
-2 2
СТОЯНИЯ между ними. Тогда \ v\ ~ (40) . А, Аг f - т] + Ц- ,
S ~ (2а) Аг 1 + А, т] + -А, Аг и выражение для нормированной характеристики точности запишется так:
a-(SpK,)
Q,b{Kll + R\ Г,2 + 0,5ДД2)]
0,25Д, Дг - n -f 0,25( д - Д)
(25.14) 361
Ясно, что при наблюдении с борта П двух соседних НИСЗ, по одному из каждой цепочки, Ai = Д2 = Л. Тогда из (25.14) следует
(25.15)
Поскольку I, У] - угловые координаты середин пар НИСЗ в топоцентрической системе координат, отсчитываемые от ближайшего узла сети, то они будут зависеть от времени и взаимного фазирования цепочек НИСЗ:
1=г и Т1 = т + б. (25.16)
Здесь
x = kx, sect;-k8 (25.17)
- трансформированные параллаксом значения углов т и б, определяемые временем т=Пср( -о) и разностью фаз НИСЗ из разных цепочек б = А/3 при оптимальном фазировании, - момент прохождения серединой первой пары рассматриваемого узла сети, laquo;ср - среднее движение НИСЗ, угловая скорость его движения по орбите, k - коэффициент пропорциональности приближенного отображения, переводящего некоторую окрестность геоцентрической сферы в соответствующую ей окрестность топоцентрической сферы (25.13): к~{рс/Яз )/Рс/(Рз -1) - где рс, R3 - радиусы орбиты и Земли. Подставляя (25.16) и (25.17) в (25.15), окончательно находим приближенную оценку точности навигационного определения по четырем НИСЗ:
а-(5рКр) ~2л
, б + Д /2 + 2бт -f
б + 2бт
(25.18)
При заданном значении б эта функция будет зависеть от-одной переменной - безразмерного времени т. Для уменьшения значения этой функции следует стремиться к максимально возможному б. Обеспечить это условие одновременно для всех узлов сети можно единственным путем, положив б = А/3. Таким образом, конфигурация, оптимальная для обеспечения наилучшей кратности покрытия, будет одновременно и оптимальной для обеспечения наилучших точностных характеристик.
Способ повышения точности обсервации подсказывает уже общая формула (25.15). Для увеличения знаменателя, входящего в эту зависимость, необходимо, очевидно, потребовать, чтобы д, Д2, т. е. чтобы угловой разнос каждой пары был различен. Это можно реализовать лишь тогда, когда из одной цепочки видно на один НИСЗ больше, чем из другой. Другими словами, для повышения точности наихудших определений требуется, чтобы наименьшее число видимых НИСЗ было не 4, а 5.
7 6 5 4
J -2 -
.\ Эксперимент Теория
N 5 Ц-J 2 1
1 2 J
4 5
1 2 3 и 5 N
Рис. 25,6, Изменение точностных ха- Рис, 25,7, Отображение эволюции со-рактеристик созвездия laquo;2 + 2 raquo; при его звездия НИСЗ типа laquo;2--2 raquo; эволюции
Для оценки точностных характеристик созвездия laquo;2 + 2 raquo; было проведено численное моделирование и результаты были сопоставлены с упрощенными аналитическими оценками. Рисунок 25.6 ил-люстрирует условия пониженной точности обсервации (7 (V lt;7) УрКдд ). Там же приведена теоретическая зависимость оценки точности, выполненная по формуле (25.18).
Рисунок 25.7 поясняет эволюцию рассматриваемого здесь созвездия во времени. Фазы эволюции созвездия laquo;2 + 2 raquo; отражены в последовательности перемещения отмеченных цифрами КА каждой пары, образующих это созвездие. Теоретическая зависимость качественно отражает результат наблюдаемого изменения точности в процессе эволюции созвездия.
2j.j. уточнение структуры сети hViC3 по минимаксному критерию точности
Полученный ранее результат имеет принципиальное значение и может быть использован для обоснования структуры сети
НИСЗ.
Исходным для решения задачи синтеза служит класс допустимых конфигураций сети, характеризующийся определенными желательными свойствами, такими как простота реализации системы, удобство эксплуатации, приемлемая структурная устойчивость, высокая точность баллистического обеспечения и т. д.
При использовании НИСЗ на средневысотных орбитах критерий минимальности общего числа цепочек НИСЗ при минимальной ширине полосы покрытия приводит, как было показано, к построению системы из взаимно перпендикулярных круговых орбит. Полученный результат представляет сравнительно узкий класс допустимых конфигураций, в котором следует выделить оптимальную конфигурацию уже по точностному критерию.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 [ 59 ] 60 61 62 63 64 65 66 67 |




