 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Сигналы и спектры
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 [ 211 ] 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358
нужно как-то разрешить. В зависимости от природы git), Фурье-компоненты могут бьпъ достаточно слабыми и могут быть расположены близко друг к другу, что затрудняет их обособление. И последнее, как и для всех степенных методов, шум приемника растет непропорционально, возможно, снижая эффективное отношение сигнал/шум детектора до непригодного для использования уровня. Этот метод не имеет такого преимущества, как возможность использования какого-либо интуитивного решения. Он предлагает прямое соединение с методами спектральных линий, рассмотренными ранее. В данных методах для восстановления чистой спектральной линии на интересующей частоте или на известной частоте, кратной несущей, применяются нелинейности - обычно степенные устройства. Тот же подход использован и здесь. Предполагаемая рациональная природа коэффициента модуляции Л используется для создания спектральных линий на частотах, кратных скорости передачи символов и несущей частоте. Данные линии могут применяться для получения и поддержания символьной синхронизации, а также для сопровождения частоты и фазы несущей.
10.2.4. Кадровая синхронизация
Практически все потоки цифровых данных имеют некоторую кадровую структуру. Другими словами, поток данных разбит на равные группы бит. Если поток данных - это оцифрованный телесигнал, каждый пиксель в нем представляется словом из нескольких бит, которые группируются в горизонтальные растровые развертки, а затем в вертикальные растровые развертки. Компьютерные данные обычно разбиваются на слова, состоящие из некоторого числа 8-битовых байт, которые, в свою очередь, группируются в образы перфокарт, пакеты, кадры или файлы. Любая система, использующая кодирование с защитой от блочных ошибок, в качестве основы кадра должна брать длину кодового слова. Оцифрованная речь обычно передается пакетами или кадрами, неотличимыми от других цифровых данных.
Чтобы входной поток данных имел смысл для приемника, приемник должен синхронизироваться с кадровой структурой потока данных. Кадровая синхронизация обычно выполняется с помощью некоторой специальной процедуры передатчика. Данная процедура может быть как простой, так и довольно сложной, в зависимости от среды, в которой должна функционировать система.
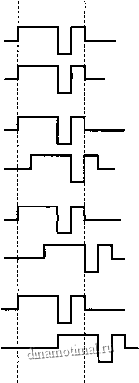
Вероятно, простейшим методом, используемым для облегчения кадровой синхронизации, является введение маркера (рис. 10.17). Маркер кадра - это отдельный бит или краткая последовательность бит, периодически вводимая передатчиком в поток данных. Приемник должен знать эту последовательность и период ее введения. Приемник, достигший синхронизации данных, сопоставляет (проверяет корреляцию) эту известную последовательность с потоком поступающих данных в течение известного периода введения. Если приемник не синхронизирован с кадровой последовательностью, корреляция будет слабой. При синхронизации приемника с кадровой структурой, корреляция будет практически идеальной, повредить которую может только случайная ошибка детектирования.
Преимущестюм маркера кадра является его простота. Для маркера может бьпъ достаточно даже одного бита, если перед принятием решения, находится ли система в состоянии кадровой синхронизации, было выполнено достаточное число корреляций. Основной недостаток состоит в том, что данное достаточное число может быть очень большим; следовательно, большим может бьпъ и время, требуемое для достижения синхронизации. Таким образом, наибольшую пользу маркеры кадров представляют в системах, непрерывно
передающих данные, подобно многам телефонным и компьютерным каналам связи, и не подходят для систем, передающих отдельные пакеты, или систем, требующих быстрого получения кадровой синхронизации. Еще одним недостатком маркера кдцра является то, что введенный бит (биты) может повысить громоздкость структуры потока данных.
п бит
п бит
пбит
п бит
- А/бит-
-А/бит-
шпг ляп.
-А/бит-
JUL.
Потокданных
пбит
пбит
пбит
пбит
-А/бит-
-А/бит-
-А/бит-
Приемник генерирует точную копию маркера Рис. 10.17. Использование маркера кадра
В качестве примера можно привести линию Т1, разработанную Bell Labs и широко используемую в североамериканских телефонных системах. Структура Т1 включает использование маркера кадра размером 1 бит, вводимого после каждого набора из 24 8-битовых байт (каждый байт представляет один из 24 возможных потоков речевой информации). При таком подходе возникает информационная структура, кратная 193 бит, - неудобное число с точки зрения большинства интефальных схем.
В системах с неустойчивыми или пульсирующими передачами либо в системах с необходимостью быстрого получения синхронизации рекомендуется использовать синхронизирующие кодовые слова. Обычно такие кодовые слова передаются как часть заголовка сообщения. Приемник должен знать кодовое слово и постоянно искать его в потоке данных, возможно, используя для этого коррелятор на согласованных фильтрах. Детектирование кодового слова укажет известную позицию (обычно - начало) информационного кадра. Преимуществом подобной системы является то, что кадровая синхронизация может достигаться практически мгновенно. Единственная задержка - отслеживание кодового слова. Недостаток - кодовое слово, выбираемое для сохранения низкой вероятности ложного детектирования, может быть длинным, по сравнению с маркером кадра. Здесь стоит отметить, что сложность определения корреляции пропорциональна длине последовательности, поэтому при использовании кодового слова коррелятор может быть относительно сложным.
Хорошим синхронизирующим кодовым словом является то, которое имеет малое абсолютное значение побочных максимумов корреляции . Побочный максимум корреляции - это значение корреляции кодового слова с собственной смещенной версией. Следовательно, данное значение побочного максимума корреляции для сдвига на к символов Л-битовой кодовой последовательности {X,} описывается следующим выражением:
Ск = jjk
(10.81)
Здесь X,(l lt;i lt;N) - отдельный кодовый символ, принимающий значения plusmn;1, а соседние информационные символы (соотнесенные со значениями индекса 1 gt;Л0 предпо-
Гпявя1П Синуппнмяяимя
лагаются равными нулю. Пример вычисления побочного максимума корреляционной функции приведен на рис. 10.18. 5-битовая последовательность в данном примере имеет неплохие корреляционные свойства: наибольший побочный максимум в пять раз меньше основного, Q. Последовательности, в которых, как на рис. 10.18, максимальный побочный максимум равен 1, называются последовательностями или словами Баркера (Barker word) [26]. Не существует известного конструктивного метода поиска слов Баркера, и в настоящее время известно всего 10 уникальных слов, наибольшее из которых состоит из 13 символов. Известные слова Баркера перечислены в табл. 10.1. После небольшого размышления становится понятно, что исчерпывающий перечень известных слов будет включать последовательности, порождаемые инверсией знака символов, и последовательности, порождаемые изменением направления хода времени в последовательностях символов, приведенных в табл. 10.1
Со = 5
с, = о
С2=1
Сз = 0
С4=1
Рис. 10.18. Вычисление побочного максимума корреляционной функции
10 2 Синуг gt;пн1/пя11иа ппмрмнмк-я




