 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Сигналы и спектры
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 [ 278 ] 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358
нал и ошибка представляются передискретизованными выборками, предшествующая ошибка квантования может быть использована как хорошая оценка текущей ошибки.
Контурный
цифровой Устройство интегратор квантования
Восстанавливающий фильтр нижних частот
х(п)
d{n)
О(-)
х(п)
Н{г)
-XLP(n)
Задержка
Рис. 13.23. Х-Л-модулятор как перегруппированный Л-модулятор
Предшествующая ошибка, образованная как разность между входом и выходом устройства квантования, помещается в регистр запаздывания для использования в качестве оценки следующей ошибки квантования. Эта структура изображена на рис. 13.24. Схему прохождения сигнала на рис. 13.24 можно перерисовать так, чтобы акцентировать внимание на двух входах (сигнал и шум квантования) и на двух контурах (включающий устройство квантования и не включающий его). Эта форма изображена на рис. 13.25 и является общепринятой для точного изображения участка обратной связи цифрового интегратора. Эта схема имеет ту же структуру, что и представленная на рис. 13.23. Из рис. 13.25 видно, что выход Z-Д-модулятора и его z-преобразование (см. приложение Д) могут быть записаны в следующем виде:
Устройство квантования
х(п)
d(n)
х(п)
ff-
H{z)
-XLp(n)
-q(n-1)
Восстанавливающий фильтр нижних частот
-Я(п)
Задержка
Рис. 13.24. Х-Л-модулятор как процесс обратной связи по шуму
lt;7(п)
Устройство квантования х(п)-(7(п-1)
Задержка
1НИЯ I
Восстанавл ивающи й фильтр нижних частот
х(п)
Задержка
Н[г)
-XLp(n)
х(п)=х(п)- lt;7(п- 1) + lt;7(п)
Рис. 13.25. Устройство квантования с обратной связью по шуму, изображенное как Х-Л-модулятор
у(,п) = х(п) = х(п) -д{п - 1) + q(n) =
= x(n) + [q(n)-q(n-l)], -
YiZ) = X(Z) - rQiZ) + Q(Z) =
= X(Z) + e(Z)[l-r]= -3)
= X(Z) + Q(Z).
Равенство (13.63) свидетельствует о том, что контур не влияет на входной сигнал, поскольку в контуре циркулирует только шум, и только шум испытывает влияние контура. Интегратор в обратной связи по шумовому сигналу превращается (с помощью контура обратной связи единичного усиления) в дифференциатор источника шума.
Удобный механизм отображения частотной передаточной функции предлагает z-плоскость (подобно своему эквиваленту, -плоскости) (см. приложение Д). Такая функция обычно описывается как дробь, числитель и знаменатель которой имеют форму полиномов, причем корни последних считаются, соответственно, нулями и полюсами передаточной функции. Эти нули и полюсы могут рассматриваться как поверхность над плоскостью, представляющей модуль передаточной функции. Эту поверхность можно представить в виде резинового полотна, натянутого относительно земли на столбики, расположенные в полюсах, и притянутого к земле в нулевых положениях. Модуль частотной характеристики представляет собой уровень этой поверхности при обходе единичной окружности в z-плоскости (или ось ico в -плоскости). Отметим, что передаточная функция шума (noise transfer Junction - NTF), которая представляет собой функцию преобразования частоты контура, примененную к шуму, имеет полюс в начале координат и переходит через нуль в точке постоянной составляющей (z = с*, О = О, так что z = 1). График, изображающий полюс и нуль функции NTF, спектральную характеристику NTF, а также типичный спектр входного сигнала представлены на рис. 13.26. Отметим, что нуль функции NTF расположен на постоянной составляющей, в окрестности которой шум квантования подавляется NTF. Таким образом, благодаря NTF возле постоянной составляющей нет значительного щума, и при этом спектр сигнала ограничен значительной передискретизацией, выполненной для того, чтобы спектр принадлежал малой окрестности вокруг постоянной составляющей с шириной примерно в 1,5% частоты дискретизации. Функцией восстанавливающего фильтра является подавление шума квантования вне полосы частот сигнала. Частота дискретизации на выходе фильтра теперь снижена для согласования с сокращенной полосой частот сигнала, практически свободного от шума. Дополнительное подавление шума может быть получено с помошью повышения порядка нуля функции NTF. Многие Z-Д-модуляторы созданы с функциями NTF, которые имеют нули второго или третьего порядка. Поскольку нули NTF обращают мощность выходного шума в нуль, вряд ли имеет значение, какой уровень мощности щума подан в контур обратной связи. Следовательно, больщинство S-Д-модуляторов создается для работы в системах, состоящих из 1-битовых преобразователей плюс несколько высокоточных модуляторов, каждый из которых работает с 4-битовыми преобразователями.
13.3.4.1. Шум 1-А-модулятора
В предыдущем разделе упоминалось, что с помощью Z-Д-модулятора можно добиться улучшения SNR в квантованных данных за счет передискретизации. Рассмотрим, как это происходит при передискретизованных фильтрованных данных с шумом AWGN, а затем изучим тот же процесс со сформированным шумом.
NTF(z) =
Сформированная мощность шума, 0(e)NTF(e)
Мощность сигнала, S(e)
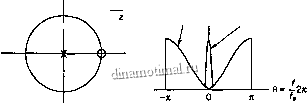
Комплексная плоскость
Рис. 13.26. Передаточная функция шума в z-плоскости, спектральная мощность сигнала и сформированный шум 1-Л-модулятора
Если шум квантования белый, а сигнал дискретизуется с частотой, превосходящей частоту Найквиста, белый шум равномерно распределен в спектральном интервале, равном частоте дискретизации. Этот интервал называется первой зоной Найквиста, или основной полосой. Поскольку энергия шума квантования зафиксирована на величине qVl2 (см. формулу (13.12)), спектральная плотность мощности шума квантования для сигнала, дискретизованного с частотой f, должна быть if/{12/;,) Вт/Гц. Работа устройства квантования с повышенной частотой дискретизации уменьшает спектральную плотность мощности шума квантующего устройства в полосе частот сигнала. Передискретизованные данные могут численно фильтроваться с целью отсечения выходящего за полосу шума квантования, после чего можно снизить частоту дискретизации до частоты Найквиста. Если сигнал выбирается с частотой, вдвое превышающей частоту Найквиста, фильтрация отбросит половину мощности щума. Отсечение половины мощности шума сокращает среднеквадратическое значение амплитуды квантованного щума в л/2 раз или мощности на 3 дБ. Чтобы уменьшить мощность шума на 6 дБ и таким образом улучшить шум квантования на 1 бит (см. формулу (13.24)), необходимо осуществить выборку с четырехкратной частотой и отсечь фильтром три четверти шума квантования. Итак, кавдое удвоение частоты произведения выборки относительно частоты Найквиста приводит к улучшению SNR преобразователя белого шума на 3 дБ (или половину бита).
Рассмотрим частоту, на которой можно улучшить SNR уже сформированного шума преобразователя, производящего выборку с повышенной частотой. Передаточная функция шума формирующего Z-Д-фильтра имеет нуль на постоянной составляющей, что приводит к нулю второго порядка в спектральной характеристике мощности фильтра. Если разложить спектральную характеристику фильтра в ряд Тейлора и отбросить все члены после перюго ненулевого слагаемого, получим следующую простую аппроксимацию зависимости фильтра, справедливую в окрестности спектра сигнала.
Н\(й) =
2 sin
V2o)J
1-C0S
(13.64)
13.3. Дифференциальная импульсно-кодовая молуляния




