 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Сигналы и спектры
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 [ 60 ] 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358
4.3.1. Области решений
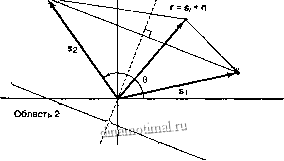
Предположим, что двухмерное пространство сигналов, изображенное на рис. 4.6, - это геометрическое место точек, возмущенных щумом двоичных векторов-прототипов (s, + п) и (S2 + п). Вектор щума п - это случайный вектор с нулевым средним значением; следовательно, вектор принятого сигнала г - это случайный вектор со средним значением s, или sj. Задачей детектора после получения г является принятие решения, какой из сигналов (s, или Sj) действительно передан. Этот метод является обычным для решения, имеющего минимальную вероятность ошибки Рв, хотя возможны и другие стратегии принятия решения [2]. Для случая М = 2 с равновероятными сигналами s, и S2 и при шуме AWGN (additive wiiite Gaussian noise - аддитивный белый гауссов шум) использование при принятии решения критерия минимума ошибки равносильно такому выбору класса сигнала, чтобы расстояние, rf(r, S,) = г- s, было минимальным, где х - норма или абсолютная величина вектора х. Последнее правило часто формулируется в терминах областей решений. Обратимся к рис. 4.6 и рассмотрим формирование областей решений. Итак, вначале необходимо соединить концы векторов-прототипов s, и sj. Затем через середину полученного отрезка проводится плоскость, перпендикулярная к нему. Отметим, что если амплитуды сигналов s, и S2 равны, эта плоскость проходит через начало координат и является биссектрисой угла, образованного векторами-прототипами. Эта биссекторная плоскость, изображенная на рис. 4.6 для случая Л/= 2, является геометрическим местом точек, равноудаленных от векторов s, и sj; следовательно, она является границей между областью решений 1 и областью решений 2. Правило принятия решения, используемое детектором, формулируется в терминах областей решений следующим образом: если сигнал расположен в области 1 - отнести принятый сигнал к s,; если в области 2 - выбрать сигнал sz- Если угол G (рис. 4.6) равен 180 deg;, набор сигналов s, и S2 описывает модуляцию BPSK. Впрочем, для иллюстрации идеи области решений вообще угол G на рисунке был заведомо выбран меньшим 180 deg;.
2(1)
Разброс значений . 111- jgl
S2 + п
llr-sill
азброс значений S] +п
1(0
Область 1
Рис. 4.6. Двухмерное пространство сигналов с равными по модулю произвалы1Ыми векторами Sj и $2
4.3.2. Корреляционный приемник
В разделе 3.2 было рассмотрено детектирование низкочастотных двоичных сигна лов в гауссовом шуме. Поскольку при детектировании полосовых сигналов используются те же понятия, в данном разделе мы просто обобщим ключевые результаты. Основное внимание будет уделено реализации согласованного фильтра, известного как коррелятор. Помимо двоичного детектирования будет рассмотрен более общий случай М-арного детектирования. Предполагается, что сигнал искажается только вследствие шума AWGN. Принятый сигнал будем описывать как сумму переданного сигнала и случайного шума:
г(0 = ,(0 + laquo;(0 0 lt;t lt;T
1 = 1, ...,М.
(4.14)
При наличии подобного принятого сигнала процесс детектирования, как показано на рис. 3.1, включает два основных этапа. На первом этапе принятый сигнал г(г) усекается до одной случайной переменной z{T) или до набора случайных переменных z,{T) (( = 1, М), формируемых на выходе демодулятора и устройства дискретизации в момент времени г = Г, где Т - длительность символа. На втором этапе на основе сравнения ?(7) с порогом или на основе выбора максимума z,{T) принимается решение относительно значения символа. Вообще, этап 1 можно рассматривать как преобразование сигнала в точку в пространстве решений. Эту точку, представляющую собой важнейшую контрольную точку в приемнике, можно назвать додетекторной (predetection point). Когда мы говорим о мощности принятого сигнала, мощности принятых шумов или отношении EiJNq, все эти величины всегда рассматриваются относительно додетекторной точки. Иногда такие параметры определяются относительно выхода принимающей антенны. Отметим, что хотя мощности сигнала и шума в разных точках системы имеют различные значения, параметр SNR можно смоделировать так, чтобы он был одинаковым в различных опорных точках (см. раздел 5.5.5). Обратите внимание, что отношение энергии бита к Ло определено там, где еще не существует бита. Биты появятся только после завершения процесса детектирования. Пожалуй, параметр EiJNq лучше было бы назвать энергией эффективного бита на Nq. Этап 2 можно рассматривать как определение того, в какой области решений расположена данная точка. Для оптимизации детектора (в смысле минимизации вероятности ошибки) необходимо оптимизировать преобразование сигнала в случайную переменную с использованием согласованных фильтров или корреляторов на этапе 1 и оптимизировать критерий принятия решения на этапе 2.
В разделах 3.2.2 и 3.2.3 показывалось, что согласованный фильтр обеспечивает максимальное отношение сигнал/шум на выходе фильтра в момент t - Т. Как одна из реализаций согласованного фильтра описывался коррелятор. Теперь мы можем определить корреляционный приемник, состоящий, как показано на рис. 4.7, а, из М корреляторов, выполняющих преобразование принятого сигнала r(f) в последовательность М чисел или выходов коррелятора, г, lt;7) ((= 1, М). Каждый выход коррелятора описывается следующим интегралом произведения или корреляцией с принятым сигналом:
г,(7= r{t)s,{t)dt 1 = 1, ...,М.
(4.15)
Опорные сигналы

r(t)si(t)c(t
Схема принятия решений
fit) = sAt)*n(t).
nt)SM(t)dt
Компаратор выбирает s/(t) с max z/( Л
Опорные сигналы
rf-m
r{t) = Si{t)*nit). N lt;.M
Схема принятия решений
Логическая схема выбирает si((), компоненты ail которого наилучшим образом
согласовываются с {zAT,)
Рис. 4.7. Корреляционный приемник: а) корреляционный приемник с опорными сигналами [s,(t)}; б) корреляционный приемник с опорными сигналами {v/j(0}
Глагол коррелировать означает совпадать , согласовываться . Корреляторы пытаются найти соответствие принятого сигнала r{f) с каждым возможным сигналом-прототипом s,{i), известным приемнику априори. Разумное правило принятия решения звучит так: выбирать сигнал s,{t), лучше всего согласующийся (или имеющий наибольшую корреляцию) с lif). Другими словами, правило принятия решения выглядит следующим образом:
выбрать сигнал s,{f), индекс которого соответствует максимальной г,(7).
(4.16)
Следуя формуле (3.10), любой набор сигналов (/=1,М) можно выразить через определенный набор базисных функций {y, lt;f)} (/= 1. ЛО, где N lt;M. Таким образом, Фуппу из М корреляторов, изображенную на рис. 4.7, а, можно заменить фуппой из N корреляторов, показанной на рис. 4.7, б, где в качестве опорных сигналов используется набор базисных функций {щ{1)}. Для принятия решения с помощью указанных корреляторов необходима логическая схема выбора сигнала sjit). Выбор производится на основе определения наилучшего согласования коэффициентов а , фигурирующих в формуле (3.10), с набором выходов {z/7)}. Если набор сигналов-прототипов {sjif)] формирует ортогональное
л Потою-ипопяимо гмгияпя R ravmoROM mVMe




