 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Сигналы и спектры
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 [ 65 ] 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358
V2(f)
Граница областей решений
Область 2
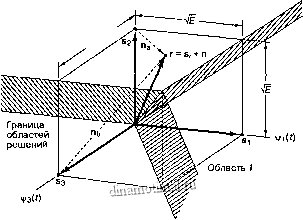
Область 3
Граница
областей
решений
Рис. 4.14. Разбиение сигнального пространства для троичного сигнала FSK
Пример 4.2. Принятая фаза как функция задержки распространения
а) Из схемы, приведенной на рис. 4.8, непонятно, откуда берутся опорные сигналы коррелятора. Кто-то может подумать, что они известны всегда и хранятся в памяти, пока не понадобятся. При некоторых обстоятельствах приемник действительно может, в разумных пределах, предсказывать некоторое ожидаемое значение амплитуды поступающего сигнала или его частоты. Но существует один параметр, который нелюя оценить без специальной помощи, - это фаза принятого сигнала. Наиболее популярным способом получения оценки фазы является использование схемы, называемой контуром фазовой автоподстройки частоты (ФАПЧ, phase-locked loop - PLL). Схема восстановления несущей захватывает прибывающую несущую волну (или воссоздает ее) и оценивает ее фазу. Чтобы показать, как иногда нереально предсказать фазу без использования ФАПЧ, рассмотрим канал радиосвязи, изображенный на рис. 4.15. Здесь мобильный пользователь расположен в точке А на расстоянии d от центральной станции, а задержка распространения сигнала равна Tj. Используя комплексную форму записи, можем описать сигнал, издучаемый передатчиком, как s(t) = ехр (Zitifot). Пусть частота /о равна 1 ГГц. Если пренебречь шумом, сигнал, принятый центральной станцией, можно записать как ф) = ехр [2jti/i(f + Та)]. Определите, на какое минимальное расстояние d (рис. 4.15) должен переместиться мобильный пользователь, чтобы это привело к изменению фазы принятого сигнала на 2к.
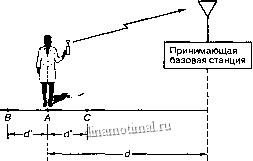
Рис. 4.15. Канал радиосвязи
б) Действительно ли нас волнует изменение фазы на 2ic? Разумеется, нет, поскольку в этом случае вектор принятого сигнала будет находиться в той же точке, что и ранее, когда пользователь находился в точке А. Но зададимся вопросом, чему равно минимальное расстояние, изменяющее фазу на 71/2 (скажем, дающее запаздывание на 71/2)? Приемник должен отнести вектор, соответствующий r{t), к той же группе, что и в п. а, но запаздывание приводит к тому, что принятый сигнал уже имеет вид r(f) = ехр [2nifo(t + TJ) - 7t/2], и коррелятор, используемый в процессе детектирования, дает нулевой выход:
coscogfcos cogf--
V 2,
dt =
coscoofsinoof Л = 0.
Определите минимальное расстояние перемещения пользователя, приводящее к изменению фазы на 71/2.
Решение
а) Пусть в начальный момент времени t - 0 мобильный пользователь находится в точке А, так что вектор, принятый центральной станцией, дается выражением rif) = ехр (2nifoT,i). Затем, после перемещения пользователя в точку В, принятый (еще сильнее запаздывающий) вектор r/f = Tj+ TJ) можно записать в виде гХг)= ехр [2nifTj+ TJ)]. Минимальное время задержки TJ, соответствующее повороту вектора на 271, равно TJ = l/fo= 10 секунд. Следовательно, минимальное расстояние для такого поворота (предполагая идеальное электромагнитное распространение со скоростью света) равно следующему:
rf = - = 3xlOM/c х10 с = 0,3 м. /о
б) Используя предьщущий результат, получаем следующее расстояние для поворота вектора на 71/2:
d 0,3 м
d = - =-= 7,5 см .
4 4
Очевидно, что даже если передатчик и приемник жестко установлены на стационарных башнях, небольшое смещение, вызванное ветром, может привести к абсолютной неопределенности относительно значения фазы. Если предположить, что используемая частота равна не 1 ГГц, а 10 ГГц, то минимальное расстояние изменяется с 7,5 см до 0,75 см. На практике зачастую желательно избегать приемников, использующих ФАПЧ. Вычисления, выполненные в данном примере, могут породить вопрос, как изменится вероятность ошибки, если в процессе детектирования не будет использоваться информация о фазе? Другими словами, чем заплатит система, если детектирование будет выполнено некогерентно? Этот и другие подобные вопросы рассматриваются в следующем разделе.
4.5. Некогерентное детектирование
4.5.1. Детектирование сигналов в дифференциальной модуляции PSK
Название дифференциальная фазовая манипуляция (differential phase-shift keying - DPSK) иногда требует некоторого пояснения, поскольку со словом дифференциальный связано два различных аспекта процесса модуляции/демодуляции: процедура кодирования и процедура детектирования. Термин дифференциальное кодирование употребляется тогда, когда кодировка двоичных символов определяется не их значением (т.е. нуль или единица), а тем, совпадает ли символ с предыдущим или отличается от него. Термин
дифференциальное когерентное детектирование сигналов в дифференциальной модуляции PSK (именно в этом значении обычно используется название DPSK) связан со схемой детектирования, которая зачастую относится к некогерентным схемам, поскольку не требует согласования по фазе с принятой несущей. Стоит отметить, что дифференциально кодированные сигналы PSK иногда детектируются когерентно. Эта возможность будет рассмотрена в разделе 4.7.2.
В некогерентных системах не предпринимаются попытки определить действительное значение фазы поступающего сигнала. Следовательно, если переданный сигнал имеет вид
,a) = J-(со5ЮоГ + ф) 0 lt;/ lt;Г
/= 1, ...,Л/,
то принятый сигнал можно описать следующим образом:
г(г) = J-со8[Юо/ + в,(/)-на]-н/1(г) 0 lt;rSr (4.41)
/=1, ...,М.
Здесь а - произвольная константа, обычно предполагаемая случайной переменной, равномерно распределенной между нулем и 2л;, а n(t) - процесс AWGN.
Для когерентного детектирования используются согласованные фильтры (или их эквиваленты); для некогерентного детектирования подобное невозможно, поскольку в этом случае выход согласованного фильтра будет зависеть от неизвестного угла а. Но если предположить, что а меняется медленно относительно интервала в два периода (27), то разность фаз между двумя последовательными сигналами 9/(71) и ЩТ2) не будет зависеть от а:
[в,(Г2) + а]-[е/Г,) + а] = еКГ2)-вХГ,)-ф,(72). (4.42)
Основа дифференциального когерентного детектирования сигналов в дифференциальной модуляции PSK (DPSK) состоит в следующем. В процессе демодуляции в качестве опорной фазы может применяться фаза несущей предьщущего интервала передачи символа. Ее использование требует дифференциального кодирования последовательности сообщений в передатчике, поскольку информация кодируется разностью фаз между двумя последовательными импульсами. Для передачи /-го сообщения (/= 1, 2,ЛО фаза текущего сигнала должна быть смещена на ф, = 2т1М радиан относительно фазы предьщущего сигнала. Вообще, детектор вычисляет координаты поступающего сигнала путем
определения его. корреляции с локально генерируемыми сигналами 2/7 coswt и
2/7 sin QCtQt. Затем, как показано на рис. 4.16, детектор измеряет угол между вектором
текущего принятого сигнала и вектором предьщущего сигнала.
Вообще, схема DPSK менее эффективна, чем PSK, поскольку в первом случае, вследствие корреляции между сигналами, ошибки имеют тенденцию к распространению (на соседние времена передачи символов). Стоит помнить, что схемы PSK и DPSK отличаются тем, что в первом случае сравнивается принятый сигнал с идеальным опорным, а во втором - два зашумленных сигнала. Отметим, что модуляция DPSK дает вдвое больший шум, чем модуляция PSK. Следовательно, при использова-




