 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Нелинейная электромеханика
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 [ 30 ] 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118
Глава 2. Динамика электрических машин
Упрощается также их числеппое иптегрировапие, поскольку в усред-пеппых уравнениях исключен временной погранслой, а следовательно, снимается проблема laquo;жесткости raquo;. Последнее является существенным преимуществом асимптотических методов. Тот факт, что параметры SfSuj малы по сравнению с Vk gt; позволяет провести дальнейшее разделение движений, поскольку переменные Ф/, будут более медленными по сравнению с Ф. Допустим еще, что среди медленных переменных также имеются более медленные ,..., /, скорости изменения которых характеризуются малым параметром Sn- Обычно можно считать, что Sf,Scj и Sn - величины одного порядка. Отделение laquo;самых медленных raquo; нестационарных процессов проводится аналогично предыдущему случаю. Сначала нужно из s - I -\- 1 уравнений относительно переменных Ф, ..., найти эти переменные как функции времени t и laquo;самых медленных raquo; переменных Ф/, со, yi,..., yi; последние считаются при этом не зависящими от t параметрами. Пайденные выражения для Ф У1-\-1, , Уз следует внести в последние два уравнения (2.5.11) и в оставшиеся уравнения относительно yi,..., yi, а затем усреднить правые части всех этих уравнений по времени t. В результате получатся уравнения laquo;самых медленных raquo; нестационарных процессов, еще более простые, чем уравнения (2.5.11). Если эти уравнения решены, то переменные Ф, , Уз можно найти, используя выражения, связывающие данные переменные с t, Ф/, со, ..., Уз-
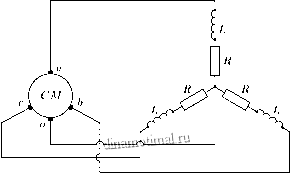
Рис. 2.10
Как отмечалось, возможны случаи, когда отношение Ег/щ не мало. Тогда переменную Ф нельзя считать быстрой, и схема разделения быстрых и медленных процессов будет отлична от изложенной. В этом случае уравнения медленных процессов будут иметь вид отличный от (2.5.11). Однако отделить самые медленные процессы можно и в этом
sect;2.5. Динамика синхронной машины
случае, так как даже при единичном значении вг/щ переменная все равно будет более быстрой, чем Ф/,а;.
При работе машины на симметричную активно-индуктивную нагрузку (рис. 2.10) расчет квазистационарных токов цепей статора сводится к нахождению частного периодического решения системы
cria + гпЧ = Ua, а Ь С, (2.5.12)
где сг = (Td -\- (Уп, (Jn и Un - безразмерные индуктивность и сопротивление нагрузки (предполагается, что сопротивление нагрузки имеет тот же порядок, что и индуктивное сопротивление цепей статора); Ua, щ, Uc - система фазных напряжений, определяемая соотношениями (2.5.6). Для определения средних токов (id), (iq) в уравнениях (2.5.12) перейти к осям d, q:
aid - (criq + Tnid = (k, criq + (crid + inid = -сФ/. (2.5.13) Средние токи (id), (iq) определяются как постоянное частное решение уравнений (2.5.13)
(2.5.14)
а;г/пФ/+а;УФ
\Q/ ~ 2,22
1У + ио а
После подстановки найденных средних токов в уравнения (2.5.11) приходим к системе уравнений третьего порядка
Ф = -iyk[Ai{uj)k + А2()Ф/], Ф/ =--т[А1()Ф/ - А2()Ф - ef/uf], (2.5.15)
ио = -е[А2{иоЩ + 1)-т1
Для отыскания стационарного решения необходимо разрешить систему трансцендентных уравнений, полученную из (2.5.15) при Ф, Ф/, cJ = 0. Наиболее удобно это сделать следуюш,им способом. В начале решить линейную систему первых двух уравнений относительно Ф/ и Ф) с коэффициентами, зависягцими от ио. Затем подставить найденные выражения для f{uo) и к{) в первое слагаемое третьего уравнения, определяюш,ее электромагнитный момент Ше, в результате чего получится одно трансцендентное уравнение относительно ио:
Глава 2. Динамика электрических машин
Существенно, что частота и сопротивление нагрузки входят в Ai(a;), A2{uj) только в виде отношения Это приводит к тому, что
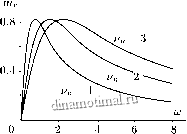
максимум электромагнитного момента как функции частоты стационарного режима не зависит от сопротивления нагрузки и достигается на частотах, пропорциональных 1Уп- Зависимости те{оо) при различных значениях г/ приведены на рис. 2.11.
При постоянном внешнем моменте т = const, меньшем, чем максимум электромагнитного момента имеются два стационарных значения частоты, причем меньшей отвечает устойчивый, а большей - неустойчивый стационарный режим. Если момент двигателя зависит от частоты со и монотонно убывает при росте со, то система допускает либо одно устойчивое, либо три стационарных решения, причем большей и меньшей частоте отвечают устойчивые, а средней - неустойчивое стационарное движение.
Используя тот факт, что переменная Ф в силу уравнений (2.5.15) является более быстрой, чем переменные Ф/ и cj, можно провести дальнейшее упрощение системы. Система (2.5.15) является при этом квазилинейной, в которой Ф рассматривается как быстрая переменная.
В первом приближении относительно малых параметров f, uj величину
Рис. 2.11
следует положить равной единице. Следуя методу разделения движений найдем общее решение первого уравнения из (2.5.15), считая Ф, = const. Имеем
(2.5.17)
Подставляя найденное решение в медленную подсистему уравнений из (2.5.15) и усредняя правые части по явно входящему времени, что равносильно в данном случае отбрасыванию быстро затухающей экспоненты в (2.5.17), получим систему второго порядка
Ai(w)-
Ф/ = -e/[(Ai(w
A2(W
-)ф/-е г
Ai(w)
(АЦсо) + АЦи))f - т{со)
(2.5.18)
Сведение уравнений (2.5.15) к автономной системе второго порядка позволяет для исследования динамики синхронного генератора с ак-
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 [ 30 ] 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |




