 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Нелинейная электромеханика
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 [ 66 ] 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118
204 Глава 4. Колебания электромагнитов
решение, а следовательно, и is2j jiszs естественно далее считать известными.
Внеся is2,...,iszs в (4.1.2), найдем токи ii,...,в норождаюш,ем приближении как функции времени, laquo;1,..., и величин к1\ф1\ Осреднив затем малые члены в (4.1.4), придем к уравнениям относительно ai,... ,ат
Pr{ai,.. .,ат) = аг(аг - arsl - brss - = О, (4.1.12)
г = 1, . . . , Ш.
Здесь
pobr
(4.1.13)
Соответствуюш,ий некоторому решению уравнений (4.1.12) периодический режим будет устойчив, если все корни Л,..., уравнения
det II dPr/das + Xirrs = О (4.1.14)
имеют отрицательные веш,ественные части, и неустойчив, если веш,е-ственная часть хотя бы одного корня положительна; случаи, когда имеются кратные, нулевые или чисто мнимые корни не рассматривается. В (4.1.14) обозначено Кг = пЦКг.
Обычно электромагниты в системе подключаются к одному источнику ЭДС и t/i(t) = ... = Urn{t), и = ... = (piJ\ т.е. выполняется условие покомпонентной синфазности. Тогда матрица dPr/dag будет симметричной и вместо (4.1.14) можно использовать уравнение, где все к: = 1. Кроме того, в этом случае (а также, когда Ф = О при всех v) справедливы указанные ранее формулировки интегрального критерия устойчивости.
Рассмотрим еш,е электромагниты с поворачиваюш,имся якорем (рис. 4.4). Обозначим через Ps угол между сердечником и якорем при недеформированной колебательной системе (рис. 4.4), а через dg - изменение этого угла при колебаниях, отсчитываемое в сторону его увеличения. Разность скалярных потенциалов во всех точках поверхностей сердечника и якоря по-прежнему считаем постоянной, а поле в ферромагнетике учтем, введя магнитное сопротивление. Отсчитывая
sect;4.2. Системы с одним электромагнитом 205
X от оси вращения, получим (рис. 4.4)
I3s + s du
Здесь b - ширина полюса (рис. 4.1, б). Интегрируя же величину BgHg по области между сердечником и якорем и добавив энергию поля в ферромагнетике, будем иметь
Выразив здесь ips через с помощью (4.1.15), получим
- 2+** + ;*o amp;.ln(l + d,M,)*- --
Производная д] /дФз равна магнитодвижущей силе. Это приводит к соотношению, связьшающему поток с токами,
-tn. gt;i..=wsji::- j.. (4.1.18,
Пондеромоторные силы, действующие на якорь, имеют относительно оси вращения момент
М--- = ф2 Г4119)
di}s 2fiobsH + ds/du)
Пз (4.1.17) - (4.1.19) следует, что решение задачи о колебаниях иод действием электромагнитов с поворачивающимся якорем можно получить из решения для электромагнитов с притягивающим якорем, если заменить соответственно на dgPs, а отношение 2/iiqSs па
l/[/iosln(l -\- ds/dis)]. Кроме того, матрицы К у и Ф должны теперь определяться из задачи о вьшужденных колебаниях под действием двух противоположно направленных гармонических моментов, равных по величине единице, из которых один приложен к якорю, а другой к сердечнику.
sect; 4.2. Системы с одним электромагнитом
Рассмотрим системы с одним электромагнитом. Приведем сначала два простых примера определения величин ку и фу (индекс, указывающий номер электромагнита, опускаем). Для системы, изображенной
Глава 4. Колебания электромагнитов
на рис. 4.1, V - скаляр, Д = 1, / = О, = Д = 1, = и
(4.2.1)
Обозначения здесь соответствуют рис. 4.1 и уравнению движения
mv + 2-fv + CV = -Q. (4.2.2)
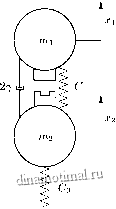
Пусть теперь колебательная система имеет вид, указанный на рис. 4.5.
Будем обозначать абстрактные (в данном случае двумерные) вектора их составляющими в квадратных скобках. Имеем v = [xi,X2], где Ж1, Ж2 - перемещения (рис. 4.5), Д = [1,0], /*i = = [0,-1], V = [1,-1], = {v,vi) = Xl -Х2. Уравнения движения имеют вид
mixi + 2{xi - Х2) + c{xi - Х2) = -Q,
Ш2Ж2 + 27(2 - 1) + С(Ж2 - Xl) + С0Ж2 = Q.
(4.2.3)
Сведя их в одно векторное уравнение, получим (4.1.5). Система на рис. 4.5 представляет собой идеализацию наиболее распространенных в технике laquo;двухмассовых raquo; вибрационных устройств. К ним предъявляется требование, чтобы сила, действующая на неподвижное основание была минимальна. Поэтому жесткость со выбирается малой и при вычислении ку,ф
V ею
Р- - МОЖНО пренебречь. Тогда ку,фу по-прежнему
будут определяться соотношениями (4.2.1), если в них положить т -
- Ш1Ш2/(Ш1 + Ш2).
Рассмотрим случай, когда магнит имеет одну обмотку, подключенную к сети переменного тока (такой магнит называется реактивным). Папряжение сети обозначим через t/sincjt. Имеем, согласно sect;4.1,
Ф = а - COSCJt,
/10 S
2Uaki 2nuj) nujfioS
9 9 1
cos{ujt -Ф1)-
(4.2.4)
2nujpoS
cos{2ujt - 2)
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 [ 66 ] 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |




