 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Нелинейная электромеханика
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 [ 67 ] 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118
sect;4.2. Системы с одним электромагнитом
Для определения а получается уравнение третьей степени Р{а) =а{а-Ь- ai) = О,
а = Rm +
fioS nujplS pis nujplS
Величины, обозначенные в (4.1.13) через ai,aii и Ьц, в (4.2.5) обозначены соответственно через а, ai,b.
Согласно известному свойству коэффициентов влияния, к gt; О, поэтому ai gt; 0. Очевидно, что постоянная составляющая должна быть больше -h. Сравнивая выражение для этой составляющей в (4.2.4) с выражением для а, заключаем, что а gt; 0.
Отвечающий некоторому решению а = а* уравнения (4.2.5) нери-одический режим устойчив, если при а = а выполняется неравенство dP/da gt; О, и неустойчив, если dP/da lt; 0.
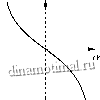
Если а lt; 6, то уравнение (4.2.5) имеет один корень а = 0 (рис. 4.6, а), причем единственный существующий в этом случае периодический режим неустойчив (так как при а = О будет dP/da lt; 0). Если же а gt; Ь, то полином Р{а) имеет три корня (рис. 4.6, б), из которых один равен нулю, а два других отличаются только знаком.
2Uki соБгрг
(4.2.5)
(4.2.6)
Ро{а)
\ а | |||
Рис. 4.6
Режим, отвечающий корню а = О, устойчив, остальные два режима неустойчивы. Но при а = О
2n?ujpoS
ко + к2 cos{2ujt - Ф2]
(4.2.7)
т. е. перемещения содержат лишь постоянную составляющую и вторую гармонику. Поэтому реактивный электромагнит можно использовать для возбуждения вибраций только частоты, вдвое больше частоты сети.
Глава 4. Колебания электромагнитов
Сделанный вывод и условие а = О обычно (см. [48, 93]) принимаются как очевидные. При этом, однако, вопрос о существовании и устойчивости других режимов не обсуждается. Приведенный же выше анализ, подтверждая данный вьшод, одновременно указьшает, что другие режимы формально существуют, хотя и нереализуемы из-за неустойчивости. Это естественным образом приводит к вопросу, не могут ли указанные режимы стабилизироваться за счет каких-либо не рассмотренных факторов. То, что так действительно может случиться, будет показано в sect; 4.6.
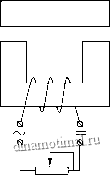
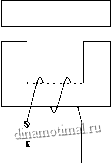
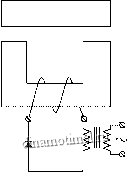
Рис. 4.7
В технике чаще требуются вибрации частоты со, чем 2со. Чтобы их получить, используют электромагниты с более сложными схемами. Возможны, например, схемы изображенные на рис. 4.7, а, б. Из них первая обладает тем недостатком, что постоянная составляющая тока проходит через источник переменной ЭДС, а переменная составляющая - через источник постоянной, т. е. цепи переменного и постоянного тока не развязаны. Аналогично, в случае рис. 4.7, в сеть будет поступать постоянная составляющая тока. Этот недостаток можно устранить, введя развязывающий трансформатор (рис. 4.7, в). Схемы рис. 4.7 получили некоторое распространение в технике. Относящиеся к ним задачи обладают следующей Рис. 4.8 особенностью. При малом активном сопротивлении
в порождающем приближении получается задача об электрических колебаниях в цепи, содержащей индуктивность и выпрямитель (рис. 4.8).
Сопротивление открытого выпрямителя считаем равным нулю, закрытого - бесконечности. Пусть вентиль заперт. Тогда к нему будет
sect;4.2. Системы с одним электромагнитом
приложено напряжение, равное напряжению сети Usmujt. При перемене знака этого напряжения выпрямитель откроется и в цепи потечет ток. Это произойдет, в частности, при t = 0. Получим
пФ = и8тииг, Ф(0) = 0. (4.2.8)
Отсюда
1 - COSCJt).
(4.2.С
Вентиль закроется, когда ток обратится в ноль. По так как Фиг одного знака (см. 4.1.2), то это случится при t = 27г/а;. Однако в этот момент напряжение изменит знак и вентиль снова откроется. Таким образом, (4.2.9) справедливо при всех t. Получилось, что с точностью до малых величин ноток, а следовательно, и сила Q, не зависит от того, каковы механические колебания.
Той же особенностью обладает и устойчивый режим в системах с реактивным электромагнитом. По в этом случае обратное влияние колебаний на возбудитель все же существенно, так оно может привести к неустойчивости.
0 W 0
Рис. 4.9
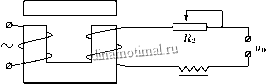
Основное преимущество электромагнитов но сравнению, например, с механическими возбудителями колебаний, состоит в том, что амплитуду можно регулировать, изменяя электрические параметры. В этом смысле представленная на рис. 4.9 схема с компенсирующим трансформатором удобнее схем рис. 4.7.
Число витков компенсирующего трансформатора и направления их включения подбирается так чтобы напряжение на вторичной обмотке трансформатора было равно по величине и противоположно по знаку напряжению, индуктируемому в донолнительной обмотке электромагнита (она называется обмоткой подмагничивания). Ток в этой обмотке будет 12 = Uc/R2- Для определения а получим уравнение
Р{а) = Ро{а) -е = а{а-Ь- aia) - е = О, (4.2.10)
где П2 - число витков дополнительной обмотки, е = 77,22 - МДС подмагничивания. Устойчивый режим существует при условии, что урав-
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 [ 67 ] 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |




