 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Нелинейная электромеханика
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 [ 69 ] 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118
sect;4.3. Системы с электромагнитами
используются теперь для создания пондеромоторных сил. По сравнению со схемой рис. 4.10 имеется то преимущество, что не нужны индуктивность L2 или сопротивление R2 (сопротивление R2 на рис. 4.11 может быть значительно меньшим, чем в случае схемы рис. 4.10). Недостатком дифференциальной схемы является большее число воздушных промежутков. Источник постоянного тока не обязателен; например, можно использовать схему рис. 4.13, где цепь подмагничивания содержит выпрямитель, дополнительную обмотку с малым числом витков и соответственно малое дополнительное сопротивление.
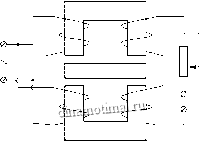
Рис. 4.11


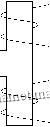
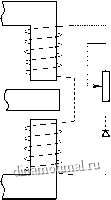
Рис. 4.12
Рис. 4.13
Рассмотрим схему рис. 4.11 или рис. 4.12. Будем предполагать, что магнитное сопротивление якоря (в случае рис. 4.11) или общей части двух П-образных сердечников (рис. 4.12) мало по сравнению с суммой магнитных сопротивлений воздушных промежутков и остальных участков П-образного сердечника. Это позволяет считать, что силовые
Глава 4. Колебания электромагнитов
линии замыкаются, как показано на рис. 4.11, и не учитывать часть потока, соответствующего штриховой линии на рис. 4.11. Имеем = -2
и. кп - кп - -к \
ку - ку - ку , фу - ipv - фу
+ 7Г.
Электромагниты предполагаем одинаковыми. Получим
= Q/ - coscjt, Ф2 = laquo;2 -
а = -
u и
COSCJt,
ko{ai - al) - 2{ai - laquo;2) - h cos{ujt - ipi)
TiUJ
(4.3.1)
Соотношения, связывающие потоки с токами, будут
mi + n2ii2 = {Rm + -j (/i + Ci)) *i, 2
Пг2-П2Ч2 = (i?M + (/l - Cl))*2-
(4.3.2)
Знаки членов ni 12 различны*) из-за того, что в одном электромагните обмотки переменного тока и подмагничивания должны быть включены согласно, в другом встречно (чтобы компенсировать ЭДС индукции в обмотках подмагничивания). Обозначив е = 712(12), получим уравнения для определения ai, laquo;2
Pi {ai, laquo;2) = ai[a- ai {aj - aj)] - b{ai - laquo;2) - e = 0,
(4.3.3)
2(1, laquo;2) = a2[a- ai{al - aj)] - b{a2 - ai) - e = 0.
Здесь a, ai, 6 определяются соотношениями (4.2.6), только в выражении для а в (4.2.6) отбрасывается член, содержащий ко.
Система (4.3.3) допускает решение вида laquo;2 = -называемое далее симметричным. Это решение будет
ai =
Пайдем производные
dai дР2
а-2Ь
= а - b - ai(ai - а) - 2aiai, = a - b - ai{a2 - а) - 2aia\,
(4.3.4)
да2 dai
(4.3.5)
= 2aiaia2 + b.
*)В sect;4.1 положительные направления токов предполагались выбранными так, чтобы все токи входили в выражение для МДС со знаком плюс. Согласно этому, МДС второго электромагнита нужно записать в виде nz2 + + n2Z22, а нри рассмотрении цени подмагничивания учесть, что Z22 = -г12.
sect;4.3. Системы с электромагнитами 215
Симметричный (т.е. отвечающий симметричному решению) режим устойчив, если корни полинома
а-Ъ- 2aial + Л Ь- 2aial
Ъ - 2aia\ а-Ъ - 2aia\ + Л
отрицательны. Преобразуя (4.3.6)
А(Л) = (а - 26 + Л)(а - 4aia? + Л), (4.3.7)
получим, что этот режим устойчив, если справедливо неравенство
А(Л) =
(4.3.6)
а-2Ь gt; 2evai/a, (4.3.8)
и неустойчив, если справедливо неравенство, противоположное (4.3.8).
Рассмотрим устойчивость остальных режимов. Составим сумму Pi -\- Р2- Сокращая на ai + laquo;2, что для несимметричных решений допустимо, получим
а - ai{ai - laquo;2) = 0. (4.3.9)
С помощью (4.3.9) можно найти несимметричные решения в явном виде; их всего четыре и они существуют или не существуют одновременно. Для устойчивости необходимо (и достаточно), чтобы коэффициенты полинома А (Л) были положительны. Преобразуем свободный член А (Л), равный \dPr/das\. Прибавим второй столбец определителя \dPr/das\ к первому, а у получившегося определителя первую строку ко второй, в результате, получим, используя (4.3.9),
\dPr/das\ = А(0) =-[2ai{a\ - al)] lt; 0. (4.3.10)
Следовательно, несимметричные режимы неустойчивы.
В симметричном режиме первые гармоники сил, действующих на якорь со стороны обеих электромагнитов, складываются, остальные - уничтожаются. Поэтому
ApTTh-.
Т. е. колебания гармонические. При е = О будет = О, иначе говоря, колебания удвоенной частоты вырождаются в данной системе в механическое равновесие. Условие его устойчивости имеет вид а - 2Ь gt; 0.
Пайдем токи в обмотках, включенных в цепи с малым сопротивлением. Пз (4.3.2) получим
nil = h cos ut + Il sin ut - h cos 2ujt - I sin 2ujt,
(4.3.12)
ni2 = h cos ujt + Il sin uut + /2 cos 2ujt + /3 sin 2ujt.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 [ 69 ] 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 |




