 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Мехатроника и робототехнология
1 2 3 4 5 6 7 8 9 [ 10 ] 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26
сила эквивалентна силе, развиваемой приводом при заторможенном свободном конце БПП, т.е. при = О. Для приведенных вьппе приводов расчетные
значения коэффициента жесткости и накопленной энергии следующие (табл. 3.6),
Табл. 3.6
Тип привода | ЭП-07-Г[пБ-02 ЭП-07-ПлБ-09 | ЭП-07-ПлБ-10 | ЭП-07-ПлБ-12 | |
, мН/м | 0,51 | 0,59 | 0,24 | |
0,13 | 0.10 | 0,03 | ||
В диапазонах напряжений, подаваемых на БПП (табл. 3.5), зависимость силы, развиваемой БПП, от перемещения свободного конца линейна (рис. 3,11). Это свойство позволяет применять изделия для ММС в качестве не только приводов, но и датчиков силы. В проспекте компании АО laquo;ЭЛЛА raquo; [32] отмечается, что БПП применяются в настоящее время для сканирующих систем лазерной техники, в устройствах микроперемещений ткацких станков, в аппаратах чтения для слепых по системе Брайля, в качестве вентиляторов локального охлаждения микросхем.
1,1 ш
0,9 0 amp; 07
0,5 0,4
0.2 0.1

ЭП-04-ПЛБ-02 ЭП-07~ПлБ-09 ЭП-07~ПлБ-10 ЭП-07~ПлБ-12
-1-1-1 I 1-т-г-
0.1 0,2 0,3 0,4 0.5 0,6 0 7 03
Рис, 3,11, Зависимость силы (И), развиваемой БПП, от перемещения (мм)
Миниатюрные биморфные пьезоприводы японской компании MURATA
[36] (рис. 3.12) на базе пьезокерамики PIEZOTITE имеют следующие параметры. При напряжении U = 200 В перемещение свободного конца пластины - не менее 1200 мкм, а сила, удерживающая свободный конец пластины в начальном положении, 83 + 20 мН. Электрическая емкость составляет 5,7 + 2 нФ. Коэффициент жесткости этого привода =0,07-10 Н/м, а максимальная накопленная энергия fF=0,05 мДж.
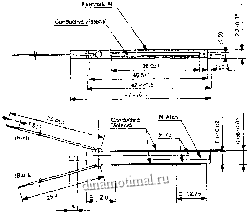
(ill mm)
Рис. 3.12. Биморфный пьезопривод компании MURATA
Сравнивая характеристики отечественного БПП ЭП-07-ПлБ-12 (табл. 3.5) с аналогичным изделием компании MURATA, можно сказать, что коэффициент жесткости отечественного привода в три раза выше, а свободный прогиб з в 2,4 раза меньше, электрическая емкость примерно в 3 раза выше. Кроме того, коэффициент гистерезиса у японского изделия около 3%, а у отечественного изделия 10?/о. БПП компании MURATA имеет выпуск металлической рессоры, который удобен для закрепления конструкции.
Сравним характеристики всех трех типов пьезоприводов, выпускаемых отечественной промышленностью. На рис. 3.13 приведена диаграмма laquo;накоп-
ленная энергия - максимальное перемещение raquo; для составных, трубчатых ц биморфных пьезоприводов в логарифмическом масштабе (для электродвигателей аналогична диаграмма laquo;мощность - скорость вращения raquo;). Как видно из графиков, наибольшее перемещение достигается при помощи биморфных пьезоприводов, а максимальная энергия накапливается в составных пьезоприво-дах. Трубчатые пьезоприводы являются промежуточными по своим энергетическим характеристикам, а по перемещению они имеют наихудшие показатели.
I, мкм
1000
3 | |||
10 100 ,мДж
Рис. 3.13. Диаграмма laquo;накопленная энергия - максимальное перемещение raquo;, 1 - составные пьезоприводы, 2 - трубчатые пьезоприводы, 3 - биморфные пьезоприводы
Анализ построенной диаграммы дает следующее. Для применения составных пьезоприводов в ММС часто бывает недостаточным их перемещение, а накопленная энергия и сила, развиваемая ими, явно избыточньт Поэтому одна из основных задач упругих механических передач состоит в увеличении хода (мультиплекции перемещений) привода за счет уменьшения силы. Аналогичная задача может быть также решена для трубчатых пьезоприводов за счет последовательного соединения приводов. Для БПП наоборот перемещения в принципе достаточны, но необходимо повысить силу привода. Такая задача может быть решена за счет уменьшения хода БПП. Более перспективный путь - это параллельное соединение БПП.
В пьезоэлектрических мехатронных модулях все указанные приводы оснащены (или могут быть оснащены) датчиками ускорений, в качестве которых выступают либо отдельные ПКШ, либо электрически обособленные участки пьезопластин или пьезокерамических трубок, работающие на использовании прямого пьезоэффекта. Эти пьезокерамические элементы могут служить в качестве датчиков силы. Однако в статическом или квазистатическом режимах достоверность получаемой от них информации может быть низкой из-за того, что статические заряды будут стекать с электродов датчиков через изоляцию. Как было показано в главе 2, мехатронные модули оснащаются в основном оптическими и пьезорезистивными датчиками. Они располагаются на упругих элементах, являющимися механическими передачами движения от пьезопривода к выходному звену - рабочему органу.
3.3. МОДУЛИ МИКРОПЕРЕМЕЩЕНИЙ НА БАЗЕ СОСТАВНЫХ И ТРУБЧАТЫХ ПЬЕЗОПРИВОДОВ
Увеличение перемещения без увеличения габаритов СПП (т.е. без установки дополнительных пьезопакетов) может быть достигнуто при помощи усложнения кинематики микромеханического модуля. По этой причине указанные пьезоприводы должны иметь механические передачи с использованием рычагов и бесфрикционных упругих шарниров. Однако этот принцип мультиплекции перемещений имеет ограниченную эффективность вследствие малого коэффициента мультиплекции.
Рассмотрим микромеханический модуль мультиплекции перемещений с Разноплечным рычагом и упругим шарниром (рис. 3.14), состоящий из СПП 1, рычага 2 с контактной площадкой 3, взаимодействующей в точке А со сферическим наконечником 4 рабочего торца СПП 1. Рычаг 2 крепится к основанию При помощи упругого шарнира 5 (применение традиционных шарниров вооб-
ще невозможно из-за люфтов). Конец рычага 3 контактирует с выходным зве. ном 6 в точке 0.
Подобная конструктивная схема может иметь место, например, в тормоз, ном устройстве шагового пьезодвигателя, в котором создание силы трена, между рабочим органом и выходным звеном осуществляется при помощк пружины (на рис. 3.14 не показана), а освобождение рабочего органа осущест. вляется при подаче напряжения на СПП. В такой конструкции важно как обеспечение необходимого усилия при торможении (около 5 Н), так и достаточна большого зазора (~ 0,05 мм) при снятии тормозного воздействия. Другим примером использования такой схемы может служить привод подачи резца прецизионного токарного станка для обработки миниатюрных изделий (ход ~ мм, усилие резания - ЮН).
При подаче напряжения U на СПП 1 его длина увеличивается и он своим сферическим наконечником 4 действует на вставку рычага 3, перемещш выходное звено 6 вверх. В точке контакта А возникают контактные деформации, которые уменьшают перемещение выходного звена 6. В отличш от идеальной схемы разноплечного абсолютно жесткого рычага с идеальньш шарниром в рассматриваемой схеме возникают дополнительные изгибные деформации самого рычага и упругого шарнира, которые также уменьшаю! перемещение выходного звена. Идеальный коэффициент мультиплекции, соответствующий схеме абсолютно жесткого рычага с идеальным шарниром определяется выражением
где 0 - перемещение точки О и (, - перемещение точки А без учета деформз ций.
Таким образом, мультиплекция рассматриваемой системы буД существено меньше, чем у идеальной схемы (расчет действительног коэффициента мультиплекции приведен в главе 5).
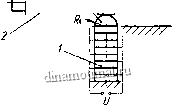
Рис. 3.14. Пьезоэлектрический модуль с рычажной системой мультиплекции
При применении системы рычагов, связанных упругими шарнирами, можно получить изменение направления перемещения выходного звена, а также увеличение перемещений не более чем в 8... 10 раз. Компактное устройство с системой упругих шарниров и рычагов (рис. 3.15) состоит из СПП 1, двух рычагов 2, трех упругих шарниров 3, выходного звена 4, заключенных в корпусе 5.
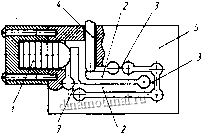
Рис. 3.15. Компактное устройство с системой утфугих шарниров и рычагов
Больший коэффициент мультиплекции можно получить в том случае, если силы сопротивления со стороны нагрузки крайне малы (например, при повороте сканирующих зеркал с малыми скоростями и малыми динамическими Воздействиями).
| 1 2 3 4 5 6 7 8 9 [ 10 ] 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 |




