 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Мехатроника и робототехнология
1 2 3 4 5 6 7 8 9 10 11 [ 12 ] 13 14 15 16 17 18 19 20 21 22 23 24 25 26
-\~-1 | ||||||||||
Рис. 4.1. Функциональная схема традиционного электромеханического привода с упругими кинематическими устройствами
Рис.4.2. Функциональная схема электромеханического привода с упругими биморфными пьезоэлектрическими звеньями
При использовании БПП, которые служат не только для тфеобразования электрической энергии в механическую, но и играют роль упругих кинематических звеньев, кинематические цепи таких приводов существенно сокращаются, обеспечивая дополнительные управляемые степени подвижности. Функциональная схема такого нового упругого устройства с БПП показана на рис 4.2 (изображение механических и электрических связей аналогично предыдущей схеме). Здесь электрический сигнал от системы управления 1 поступает одновременно на БПП, служащие как упругими направляющими звеньями 2, так и упругими передаточными звеньями 4, которые задают траекторию движения жесткого выходного звена 5. Движение от упругих звеньев с БПП 2 через промежуточные жесткие звенья 3 передается к звеньям с БПП 4 и от них к выходному звену 5. Механическое воздействие нагрузки в отличие от предыдущей схемы оказывается на преобразующие элементы 2, 3, 4, а также на выходное звено 5. При механическом внешнем воздействии система управления может корректировать траектории движения всех упругих звеньев по отдельности, т.к. они одновременно являются преобразующими. Сравнивая эти две функциональные схемы, можно сделать вывод, что схема с БГШ имеет более короткую кинематическую цепь и большие функтщональные возможности для коррекции и управления траекторией выходного звена.
Довольно часто встает задача получить не просто большое перемещение выходного звена, но и получить его движение с отфеделенной траекторией.
Здесь речь идет о колебательном (качательном) движении выходного звена упругих устройств с малыми перемещениями из-за ограничения по деформациям. Кинематика упругих устройств, позволяющих совершать движение выходного звена по жестко определенной траектории, давно и глубоко исследована и широко применяется в приборах и микроманипуляционных системах [2, 16].
Можно выделить основные кинематические цепи модулей микроперемещений, которые передают выходному звену устройства определенную траекторию движения. Эти кинематические цепи могут содержать как преобразующие элементы (пьезоэлектрические преобразователи), так и пассивные упругие элементы. Выходное звено может воспроизводить движение по траекториям следующих типов: прямолинейным и криволинейным (с постоянной и управляемой формой траектории). Криволинейные траектории могут осуществляться по линии (прямолинейной или по дуге в плоскости или по винтовой линии), а также по замкнутой линии. В частности траектории могут быть круговыми. Эллиптическими, laquo;8 raquo;-образными и т.д. Эти траектории постоянной формы, а также меняющиеся от цикла к циклу траектории, могут быть воспроизведены только при помощи системы управления, задающей не только значение пере- laquo;ещения, но и форму траектории. Для обеспечения управляемой траектории Движения выходного звена необходимо иметь кинематические цепи с двумя и более степенями свободы. К ним можно отнести упругие шарниры с двумя
степенями свободы, а также последовательно соединенные упругие кинематические элементы - направляющие и упругие шарниры с одной степенью свободы.
4.1. АКТИВНЫЕ УПРУГИЕ НАПРАВЛЯЮЩИЕ
Как было сказано выше, повышение компактности, точности отработки движений в приборах и иных устройствах может быть достигнуто за счет укорочения кинематической цепи от преобразователя энергии до выходного звена. Для этой цели как нельзя лучше подходят пьезопреобразователи и особенно биморфные. БПП являются одновременно преобразующими и упругими элементами. Они компактны и легко встраиваются в сами кинематические звенья, тем самым кинематическая цепь укорачивается со всеми вытекающими последствиями [9].
Направляющие устройства поступательного движения построены по схеме упругого параллелограмма, перемещения которого реализуются упругими плоскими рессорами. Для получения поступательного движения при помощи активных упругих направляющих (АУН) с БПП, на них подают напряжение, при котором БПП изгибаются и соответственно изгибаются рессоры в целом, формируя траекторию выходного звена (рис. 4.3).
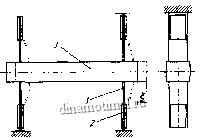
Рис. 4.3. Гфостейший тип АУН
Кинематическая цепь упругого активного параллелограмма позволяет выходному звену совершать поступательное движение, если рессоры 1 с БПП 2 расположены симметрично относительно оси звена 3.
Использование квазипараллелограмма (рис. 4.4) с круглыми перфорированными рессорами 1, на которых установлены БПП 2, увеличивает жесткость системы в целом при несимметричной нагрузке, действующей на выходное звено 3.
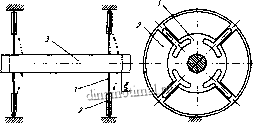
Рис. 4.4. Активный квазипараллелограмм
Механизм активного упругого параллелограмма может бьггь использован для получения эффекта вибротранспортирования. Вибропитатель миниатюрных деталей (рис. 4.5), работающий на частотах 50 - 150 Гц, состоит из основания 1, на котором наклонно закреплены плоские рессоры 2 с БПП, и лотка 3 с перемещаемыми деталями 4 [41].
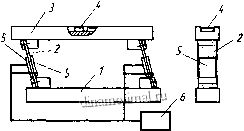
Рис. 4.5. Пьезоэлектрический вибропитатель
Переменное напряжение подается к пьезоэлектрическим элементам 5 от генератора 6. Из-за большой длины рессор с БПП пространство между рессорами свободно. Возможна установка под лотком бункера для деталей, который крепится к самому лотку. В этом случае подача деталей на лоток из бункера может осуществляться при помощи импульсов сжатого воздуха [42].
Для уменьшения вертикальных габаритов могут быть применены активные направляющие, у которых БПП расположены вдоль рабочего звена .Устройство (рис. 4.6 а) [44] содержит основание 1 с двумя плоскими рессорами 2 малой длины и лоток 3 с перемещаемыми деталями 4. Параллельно лотку на серединах рессор 2 установлена рессора 5 с БПП б и 7, к которым подключен генератор гармонического напряжения 8. В этом случае изгиб рессор 2 формируется за счет передачи изгибающего момента со стороны рессоры 5 с БПП 6 и 7 (рис. 4.6 Ь). Вертикальные габариты такого устройства примерно в два раза ниже, чем вибропитателя, изображенного на рис. 4.5.
-1
Рис. 4.6. Пьезоэлектрический вибропитатель малой высоты (а) и схема изгиба рессоры (Ь)
Описанная выше упругая схема с активной рессорой, расположенной вдол* выходного звена может быть применена в качестве компактного модуля поступательных движений выходного звена микроманипулятора. Такое устрой ство (рис. 4.7) состоит из цилиндрического корпуса 1, внутри которого на тонких проволочных рессорах 2 и 3 закретшены цилиндрическая платформа 4 * 78
четыре плоские рессоры 5 и б. На каждой из них имеются БПП 7 и 8. Таким образом, каждая рессора 5 установлена на двух парах проволочных рессор 2 и каждая рессора 6 установлена на двух парах проволочных рессор 3, проходящих насквозь корпуса \. Вертикальные гфоволочные рессоры 2 и горизонтальные проволочные рессоры 3 сдвинуты относительно друг друга на малое расстояние, чтобы они не пересекались в одной точке на тшатформе 4. При подаче напряжения на все БПП 7 и 8 рессоры 5 и 6 изгибаются так же, как показано на рис. 4.6 Ь. В результате этого выходное звено 9 вместе с платформой 3 поступательно перемещается вдоль оси на расстоятше . Такая упругая система отличается повышенной жесткостью и силой, развиваемой пьезоприводом.
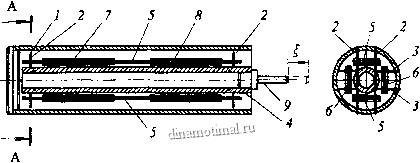
Рис.4.7. Модуль поступательных перемещений на базе четьфех рессор с БПП
Приведенный модуль поступательных перемещений на базе четырех рессор с БПП с габаритами 0 8х 60 мм имеет ход 0,2 мм при блокирующей силе 2 Н.
4.2. АКТИВНЫЕ УПРУГИЕ ШАРНИРЫ
Для создания качательного движения относительно неподвижной точки мо- быть использованы активные упругие шарниры (АУШ) с БПП [9]. Они акже выполняют две функции - функцию задания кинематики движения и Фзтгкцию преобразования электрической энергии в механическую. Здесь важ-
| 1 2 3 4 5 6 7 8 9 10 11 [ 12 ] 13 14 15 16 17 18 19 20 21 22 23 24 25 26 |




