 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Мехатроника и робототехнология
1 2 3 4 5 6 7 8 9 10 11 12 [ 13 ] 14 15 16 17 18 19 20 21 22 23 24 25 26
но, что из-за малой массы и размеров Б1Ш его инерционные характеристик!: мало влияют на динамику конечного звена (в противоположность устройству имеющему электромеханический привод и передачу). По аналогии с упругим( щарнирами АУШ обладают такими же достоинствами. Кроме того, установка БПП на самом щарнире резко сокращает кинематическую цепь от преобразователя энергии до выходного звена и соответственно уменьшает габариты устройства в целом, а также увеличивает его быстродействие и точность отработки углового перемещения.
При качательном движении жесткого звена за счет АУШ для многих задач приборостроения важно иметь фиксированную точку качания, т.е. мгновенный центр скоростей жесткого звена должен оставаться постоянным (например для зеркальных сканирующих устройств). Рассмотрим некоторые схемные решения АУШ. Наиболее простой вариант АУШ (рис. 4.8) представляет собов защемленную с двух сторон плоскую рессору 1 с закрепленными на ней симметрично двумя БПП 2 и 3. Посередине рессоры установлено жесткое выходное звено (стержень) 4. При подаче напряжения на БПП 2 и 3 со сдвигом фаз 180 deg; изгиб рессоры будет иметь волнообразную форму. Точка О на рессоре остается неподвижной, а звено 4 будет совершать качательное движение вокруг точки 0. Угол поворота такого устройства составляет обычно доли градуса Возбуждая колебания второй формы изгибной моды в данной упругой системе можно добиться значительных амплитуд угловых смещений звена 4 (= 2-5 deg;). Если необходимо иметь устройство, в котором конечное звено мож amp; иметь изменяемую ось качания, то эта задача легко решается за счет разници подаваемого на БПП 2 и 3 напряжения. В зависимости от соотношения ампл* туд электрических напряжений, подаваемых на БПП 2 и 3, координата мгновенного центра скоростей О жесткого звена 4 может изменяться по программ В этом случае система имеет две степени свободьт При своей простоте даннЫ варианты АУШ имеют серьезный недостаток - из-за малой жесткости рессор в направлении, перпендикулярном ее плоскости, могут возникнуть паразитнЫ
колебания точки О, что приведет к спонтанным смещениям оси качания шарнира.
4 1 7 i

Рис. 4.8. Простейший пьезоэлектрический АУШ
Для устранения указанного недостатка возможно крестообразное соединение двух рессор в точке О - центре качания (рис, 4.9). Две рессоры 1 и 2 с БПП 3 имеют общую центральную часть в точке 0. В этом случае жесткость системы в направлении, перпендикулярном плоскости рессор, становится высокой. В качестве недостатка можно отметить увеличение габаритов по сравнению с первым вариантом. Для увеличения угла поворота можно применить последовательное соединение таких АУШ (рис. 4.10). Устройство имеет БПП 1 на рессорах 2, которые зафиксированы на осях 3, каждая из которых установлена в корпусе предыдущего АУШ.
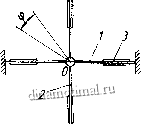
Рис. 4.9. Крестообразный АУШ.
Такая конструкция имеет большую инерционность из-за массивных кольцевых корпусов АУШ, поэтому быстродействие устройства низкое.
; 2
7ZZZZZZZZZZZU
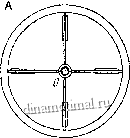
Рис.4.10. Последовательное соединение АУШ
В ряде случаев по конструктивным соображениям (когда место нахождения оси качания занято) могут быть рекомендованы асимметричные АУШ (рис, 4.11). Рессоры 1 и 2, имеющие БПП 3 и 4, закреплены на жестком звене 5 под некоторым углом, не равном О и я. Центр качания находится в мгновенном центре скоростей жесткого звена 5. Однако его движение может оказаться вне границ устойчивости в динамических режимах, и центр качания будет laquo;гулять raquo;.
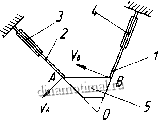
Рис.4.11, Асимметричный АУШ
Все приведенные АУШ имеют незначительные углы поворота, что связано с кинематическими особенностями этих схем. На порядок могут быть увели-
чены углы поворота за счет применения известной в приборостроении скрученной ленты [2]. Устройство со скрученной лентой и приводом от БПП дает выигрыш в компактности и в плавности движения выходного звена, по сравнению с электромеханическим приводом [9]. Оно состоит из (рис. 4.12) двух скрученных лент 1 и 2, соединенных жестким звеном 3 со стержнем 4. Один из концов скрученной ленты 1 закреплен в центральной части рессоры 5 с БПП 6. Скрученная лента 2 зафиксирована на основании 7. При подаче напряжения на БПП центральная часть рессоры 5 перемещается вместе с концом ленты 1 на расстояние . Ленты начинают раскручиваться и стержень 4 поворачивается на угол р и смещается на расстояние /2. Таким образом, выходное звено двигается по винтовой линии. Чтобы получить движение по окружности, необходимо применить симметричную схему, закрепив второй конец ленты 2 на второй рессоре с БПП. При габаритах устройства 100x60x10 мм можно получить угол поворота около 20 deg;. Такое устройство обладает пониженной жесткостью на скручивание, поэтому его целесообразно использовать в качестве стрелочных указателей или в оптических системах для сканирования луча с малыми скоростями при помощи качающегося миниатюрного зеркала, а также в ультразвуковых медицинских сканерах.
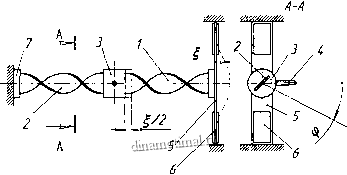
Рис.4.12. Устройство поворота со скрученной лентой и БПП
Движение выходного звена по винтовой линии используется для вибротранспортирования деталей в миниатюрных вибробункерах. Эти системы имеют высокую крутильную жесткость и работают обычно в околорезонансных режимах. Такой пьезоэлектрический вибробункер (рис. 4.13) для миниатюрных деталей часовой промышленности имеет на основании 1 три наклонные рессоры с БПП 2, которые закреплены на платформе 3 с наружной чашей, имеющей винтовую дорожку для деталей [45]. При напряжении 100 В с частотой 150 Гц движение деталей осуществлялось со скоростью 4-5 мм/с, что вполне приемлемо для сборочных автоматов.
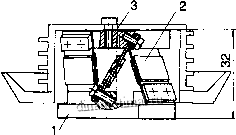
Рис. 4.13. Пьезоэлектрический вибробункер
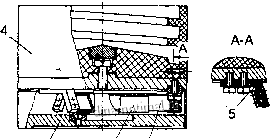
Это устройство имеет довольно большие габариты по высоте, т.к. рессоры расположены под небольшим утлом к вертикали исходя из требований вибротранспортирования. Для уменьшения габаритов (рис. 4.14) возможно горизонтальное расположение на основании 1 трех наклонных рессор 2 с БПП 3,
1 3 2 17
Рис. 4.14. Пьезоэлектрический вибробункер с горизонтальными рессорами
которые закреплены по периферии чаши 4 вибробункера на угольниках 5 [45].
В отличие от распространенных в приборостроении вибробункеров с электромагнитными вибраторами пьезоэлектрические бункера мало чувствительны к перекосу чаши и погрешностям исполнения рессор и могут управляться от компьютера.
Все рассмотренные выше модули микроперемещений с пьезоприводами являются упругими устройствами, имеющими одну степень свободы. Изменяя напряжение, подаваемое на пьезопреобразователи, мы можем изменять амплитуду перемещения, а форма траектории выходного звена остается неизменной.
4.3. МОДУЛИ МИКРОПЕРЕМЕЩЕНИЙ С УПРАВЛЯЕМОЙ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ
Как было сказано выше, сложные управляемые траектории движения выходного звена используются в микроманипуляторах, предназначенных для биологических исследований и сборки компонентов микроэлектроники, в двухкоординатных оптических сканирующих устройствах. В последнее время управляемые траектории осуществляются в прецизионных многокоординатных пьезоприводах и оптических системах навигации спутников.
В зависимости от решаемых задач выходное звено микроманипулягщонных систем может иметь от двух до шести степеней свободы. Последовательное соединение модулей микроперемещений с пьезоприводами, каждый из которых имеет одну степень свободы, дает возможность управлять траекторией движения объекта манипулирования. Последовательно-параллельное соединение модулей микроманипулятора с тремя степенями свободы (рис. 4.15) имеет повышенную жесткость по сравнению с микроманипулятором, в котором три БПП соединены последовательно под прямым утлом друг к другу. Расположенные в одной плоскости БПП 1 с одной стороны консольно закреплены на Основании, а с другой - жестко связаны со второй парой БПП 2, которые па-
| 1 2 3 4 5 6 7 8 9 10 11 12 [ 13 ] 14 15 16 17 18 19 20 21 22 23 24 25 26 |




