 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Мехатроника и робототехнология
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [ 16 ] 17 18 19 20 21 22 23 24 25 26
му для ММС при толщине пьезоэлемента 1 мм напряжение обычно не превышает 300-i- 500 В.
Для частного случая, когда Р = 0 мы получим максимальное перемещение:
Жесткость пьезопривода определим из выражения
п - ДД -
ЛЗЗ j-Jp
(5.10)
Из формулы видно, что жесткость привода не зависит от электрических параметров. Она прямо пропорциональна площади пьезошайбы и обратно пропорциональна длине пьезопакета.
Для пьезопреобразователя со следующими параметрами: Lp =5,6 ЛОГм, D, =2,2-10-4 Dj=l,0-10-V /гр = 0,5-104, D=\,(i-W\4, 4=1,7-Wmh-, зз = 3,3-10- 7ат (для пьезокерамики марки ЦТС 19), [Гз] = 3,0-10Ям-, Е, =2,М0 Яи-, при нагрузке Р = 100Я, Р = 1000Я, и = 300 В расчеты дают следующие результаты: перемещение торца пьезопреобразователя при предварительной стяжке =-3,1-10 л/, перемещение торца пьезопреобразователя = 5,2-10м, а максимальное перемещение =5,5-10JW при Р = 0. Максимальная сила преобразователя Ршах = 17-10Я, Гз = б,2-10Яйг при = 0. Жесткость привода с=Ъ,2Л0*Н/м.
Формула (5.7) справедлива и в случае, когда U lt;0, т.е. при уменьшений поперечного размера пьезошайбы. Однако следует учесть, что в случае недостаточно большой силы затяжки Р и отсутствии внешней нагрузки {Р = 0) весь пакет пьезошайб может потерять монолитность конструкции, т.к. общая длй1й
пакета уменьпштся настолько, что деформация предварительно растянуто 98
стяжки S будет недостаточной для силового контакта с пакетом. Должно соблюдаться условие 5з lt; Sj , которое выразится следующим образом для силы стяжки:
1 + R laquo; /г
(5.11)
Полезная работа по преодолению внешней нагрузки, произведенная лреобра-зователем при перемещении его торца на величину ;
ЗЗ JJ 33 р
1 + S.
(5.12)
Численное значение полезной работы при указанных выше параметрах составляет около 5,2-10 * Дж.
5.3. МОДУЛЬ МУЛЬТИПЛЕКЦИИ ПЕРЕМЕЩЕНИЙ
Рассмо-фим пьезоэлектрический модуль с рычажной системой мультиплекции (рис. 3.14). Цель расчета - определение основных параметров модуля при заданных внешних воздействиях. Представим расчетную схему устройства в виде одномерной статически неопределимой ухфугой системы (рис. 5.2.а), состоящей из консольно закрепленного ступенчатого стержня с промежуточным Шарниром в точке А (являющейся точкой контакта рычага со сферическим наконечником). Этот промежуточный шарнир находится на упругом основании, Которое перемещается вверх за счет составного пьезопривода (на схеме оно Показано в виде пружины). Упругое основание по действию является эквива- 1ентом проявления контактных деформаций вставки рычага и сферического Наконечника. Короткая тонкая часть стержня длиной b и толщиной h является Эквивалентом упругого шарнира системы. Сила F в точке О - это внешняя на-
грузка со стороны выходного звена системы. Сила Р характеризует воздействие пьезопривода на рычаг. Под действием этих сил ступенчатый стерженг деформируется, что приводит к переметцениям точек А и О (рис. 5.2.Ь). Ось х на расчетной схеме совпадает с осью недеформированного стержня (рычага), ось у направлена вертикально вверх, начало координат совпадает с точкой О приложения силы F. Найдем перемещение точки О и действительный коэффициент мультиплекции перемещений
(5.13)
где f, - перемещение рабочего торца пьезопривода. Найдем также максимальные значения перемещения 4 и действительного коэффициента мультиплекции при фиксированных габаритах модуля и нагрузке F.
7i | |||||
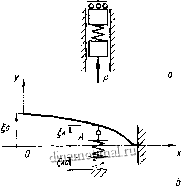
Рис. 5.2. Расчетная схема мультиплексной системы: а - схема действия сил: b - схема перемещений
Для идеальной схемы с абсолютно жестким рычагом, когда упругий шарнир представляется в виде идеального шарнира в месте заделки, коэффициент мультиплекции перемещений можно определить следующим образом;
(5.14)
где Д - длина первого (утолщенного) участка рычага.
Для расчета рассматриваемой статически неопределимой системы выберем основную систему в виде консольного стержня (рис. 5.2.Ь), в которой действие ш gt;езопривода заменим силой Р. Для определения перемещений воспользуемся методом Мора с учетом перерезывающих сил. Перерезывающие силы оказывают существенное влияние на перемещения в связи с тем, что длина участка упругого шарнира соизмерима с его толщиной, а точка приложения силы Р при большой мультиплекции должна находиться вблизи упругого шарнира. Найдем перемещение в точке А, приложив к ней единичную силу 1, направленную вверх:
а и L,+b
= -Jo Fxk, lt;h+J1 (x - а\Р{х -а)-Рх\Х,(кл-\\-{х-a\P{x -a)- Fx] dx +
0 a i,
+jk-lP/,dx+j кЛ-Рг:, plusmn;
где Л, - податливость сечения первого участка стержня длиной Z /1 - податливость сечения второго (тонкого) участка длиной Ь, / я - податливости сечений при сдвиге первого и второго участков, к - коэффициент формы сечения участка (в нашем случае для прямоугольного сечения обоих участков = 1,2). Указанные параметры в приведенном выражении определяются следующим образом:
где Ef,Ej2 - модули упругости соответствующих участков, JJ моменты инерции сечений соответствующих участков, которые определяются выраже-ниями
г-Ш. I -Ml 12 ~ 12
где - ширина рычага на первом участке, - ширина рычага на втором участке. Модули упругости при сдвиге находятся по формулам:
2(14-м) 2(14- ,) где , и ц- коэффициенты Пуассона для первого и второго участков, Q, и Qj- площади поперечного сечения первого и второго участков. Здесь необходимо дать пояснение по поводу формулы для нахождения А. В связи с тем, что второй участок короткий и его высота h сравнима как с длиной этого участка Ъ, так и его шириной , в нем присутствует цилиндрический изгиб [48], поэтому в формуле присутствует коэффициент Пуассона jjl .
Произведя вычисления, получим перемещение точки А как функцию
\ Ъ Ъ 2 2 6
( \ \ 1
--V + зА +Ь+А,а%-2\аЦЬ - Ipb- ЯДа+ХЬ +ХрЬ +Хр
+к[г,{Г-а) + Г2Ь]Р- (5.15)
С другой стороны, перемещение рабочего торца пьезопреобразователя q, которое эквивалентно перемещению точки А рычага без учета контактных деформаций вставки рычага, определяется действием напряжения U и силой / приложенной к пьезопреобразователю со стороны рычага, определяется формулой (5.8):
= в,.и-с,-р.
Перемещение точки А с учетом контактных деформаций вставки рычага и сферического наконечника при их сдавливании определяется следующим образом:
. = 1.о- amp; gt; (5.16)
где - деформация вставки рычага и сферического наконечника. Деформация не линейно зависит от силы Р. Здесь можно воспользоваться решением laquo;задачи Буссинеска raquo;, определяющим деформацию плоскости в центре круглой площадки, на которую действует сила Р [1]. Учитывая это, контактная деформация находится по формуле:
где Ef-f и E - модули упругости вставки рычага и сферического наконечника, и - коэффициенты Пуассона для материала вставки рычага и сферического наконечника, q - давление в зоне контакта, R - радиус пятна контакта плоскости со сферической поверхностью, Q - площадь пятна контакта. Радиус пятна контакта можно определить при помощи приближенной формулы Герца [1]:
=0,88зЛ,
1 1
где - радиус сферической поверхности наконечника (см. рис.3.14). Используя две последние формулы, окончательно получим контактную деформацию
=D,P\ (5.17)
0,88л- iR,
1 1
\,РмУ Р-МА
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [ 16 ] 17 18 19 20 21 22 23 24 25 26 |




