 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Мехатроника и робототехнология
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 [ 17 ] 18 19 20 21 22 23 24 25 26
Из (5.17) видно, что зависимость контактной деформации от силы сжатия нелинейна, поэтому представить область контакта вставки рычага со сферическим толкателем в виде пружины с постоянным коэффициентом жесткости не представляется возможным.
Подставив в (5.16) из (5.8) и из (5.17), получим следующее уравнение
sect; = BU-CP-DPK (5.18)
Рещив совместно систему уравнений (5.15) и (5.18) при помощи аналитического процессора программы Mathcad 2000, найдем силу Р, с которой пьезопри-вод действует на рычаг, как функцию нагрузки F:
P = f{F). (5.19)
Из-за громоздкости выражения (5.19) раскрывать его не будем.
Теперь методом Мора найдем перемещение 4 в точке О, приложив в этой
точке единичную силу 1, направленную вверх:
= -\\-x-Fx,dx+ 1 \-x[P{x-a)-Fx\,dx+\-x{x-a\P{x-a)-Fx\Xdx-
й а А
- kFydx-\k{F-P)Y,dx- J к{Р-Р)г2х.
й а Ц
Произведя вычисления, получим зависимость = f[F,P):
цкг,+иц+кггЬ+ь%ц + -Ь% + ЬЯЦ
v-l9\ +ЬХД+1Х-bA-h%a+Lkr, +11-ак\ +ку+-Ха 3 2 3 6 ,
Р. (5.201
Подставив в (5.20) Р из (5.19), получим окончательно формулу для определи ния перемещения точки О (из-за громоздкости выражения приводить ее не о}-
дем):
=/И, (5
используя которую в формуле (5.13), можно определить зависимость действительного коэффициента мультиплекции к, от внешней силы F. Для анализа влияния контактных деформаций в точка А на перемещение точки О определим также перемещение точки О без учета контактных деформаций
она получается из (5.21) при = О, т.е. при = ju=0 (см. 5.17).
Обычно при проектировании задают внешнюю силу и габариты устройства, а находят остальные геометрические паметры устройства, хфи которых перемещение выходного звена максимально. В нашем случае таким параметром, который нужно найти, является расстояние а.
Произведем численные расчеты для следующих значений параметров системы. Пусть рычаг, выполненный из стали, имеет следующие параметры: 4 = 5,0-10 л lt;, Ь = 3,0-10 л lt;, й, =5,0-10 д lt;, к = 1,5 ЛОГ м. ширина рычага на обога участках одинакова: b=b2=5,0 lOм, расстояние между точками О и А варьируется в пределах длины Ц первого участка рычага: 0 lt;а lt;5,0-10 .и. Нагрузка на рычаг - F = 5,0H. Пьезопреобразователь выполнен из пакета пьезошайб, содержащего и = 100 пьезошайб толщиной hp = 0,5-10лш, с внешним диаметром D, = 2,3-10 л lt; и внутренним диамет-
ром = 1,3 10 л lt;. Он стянут стальной стяжкой диаметром D3 = 1,0 10 л lt;. Пьезокерамика ЦТС-19 имеет следующие параметры d, =330-10 Кл/Н, *зз = 1,7-10 л lt;УЯ. На пьезопривод подается напряжение [7 = 3005.
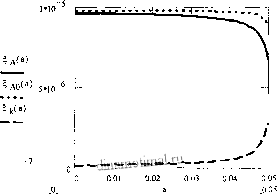
На рис. 5.3 приведены графики зависимостей До), (о), {а) при заданной нагрузке F. Из графиков видно, что контактные деформации существенно повышаются в диапазоне 0,04 lt; а lt; 0,05л lt;, поэтому в нем происходит ение перемещения точки А с учетом контактных деформаций. Расчеты по- али, что при замене материала вставки рычага и сферического наконечника ~ вольфрама на сталь контактная деформация повышается на 56-58%.
.9.799168 10*,
,1710406 10
Рис. 5.3 . Зависимости перемещения точки А с учетом контактных деформаций , перемещения точки А без учета контактных деформаций и контактных деформаций от расстояния а (все переменные в метрах)
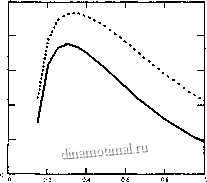
Графики зависимостей перемещений {а) и {а) показаны на рис. 5.4. Функция (о) имеет ярко выраженный экстремум: максимальное реальное перемещение точки О 8,6 10~м достигается при а = 4,9 Юм. Уменьшение перемещения при дальнейшем увеличении а объясняется преобладающим влиянием контактных деформаций и деформаций сдвига при расположении точки А вблизи заделки рычага. Расчеты показали, что при стальных вставке рычага и толкателе результат хуже на 17%, чем при вольфрамовых.
Приведенные расчеты учитывают деформации сдвига при приложении поперечной к оси рычага внешней силы F. Этот учет характеризуется коэффициентом формы поперечного сечения (в нашем случае для прямоугольных сечений к = 1,2 [48]). Рассмотрев случай, когда к = 0, мы определим перемещение точки О без учета сдвиговых деформаций. Расчеты дают следующий результат; 4= 0) = 10,5 10м при йг = 4,9 Юм, что на 22% выше, чем с учетом сдвига. Следовательно, учет сдвига существенно повышает точность вычислений.
,1.23942 -10
1.5 laquo;10
laquo;0(а) 1-10
? 00)
Д441112 -10*,
5 40
1 1 1 1 .......... .............................. laquo; | |
laquo;А | |
1 ! ; 1 : | |
0.01 0.02 0.03 0.04 0.05 а ,0.05 .
Рис. 5.4. Зависимости перемещения точки О с учетом контактных деформаций 5 и перемещения точки О без учета контактных деформаций перемещений точки О от расстояния а (все паметры в метрах)
Графики зависимостей коэффициентов мультиплекции к{а) и (а) приве-дены-на рис. 5.5. По хактеру они аналогичны зависимостям (о) и 4q(o)
, ,17.666667
,0.963461 ,
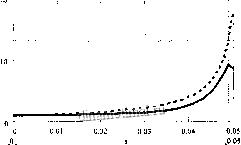
Рис. 5.5. Зависимости действительного коэффициента мультиплекции и идеального коэффициента мультиплекции к от расстояния а (м)
Более наглядной характеристикой эффективности работы исследуемого
Устройства может служить коэффициент эффективности К = -, показываю-
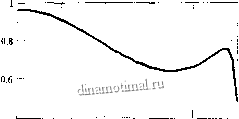
П1ИЙ насколько реальная конструкция близка к идеальному рычагу по мульти-лекоди перемещений, зависимость К (а) приведена на рис. 5.6.
0.964153,
К(а)
Д491597, 0 4
0.01 0.02 0.03 0.04 0.05
а 0.05,
Рис. 5.6. Зависимость коэффициента эффективности мультиплекции К от расстояния а (м)
Анализ К{а) показывает, что функция имеет два максимума; при а=й К = 0,96 и при а = 4,9Л0м К = 0,76, а также два минимума; прн 0 = 3,5-10-л lt; =0,67 и при 0 = 5,0-10 л lt; А:-0,49.
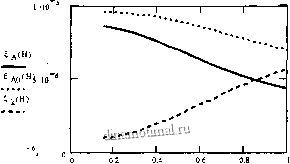
Теперь рассмотрим влияние толщины второго (тонкого) участка h, являющегося эквивалентом упругого шнира, на перемещение в точке О и на действительный коэффициент мультиплекции. Для этого целесообразно ввести безразмерный паметр Н = ш рассмотреть зависимости J,H), о(Н) и
sect;,(Н) (рис. 5.7), 4(Я) и 4 (Я) (рис. 5.8), кЮ и к,(Н) (рис. 5.9), ЦН) (рис.5,10) при выше указанных численных значениях параметров. Для анализа выбрано значение параметра а = 4,9-10м, при котором перемещение 4 максимально.
Графики (рис. 5.7) показывают, что контактные деформации достигакя максимума при Я =1, т.е. в случае, когда на рьиаге отсутствует тонкая часть, причем они сравнимы по величине с перемещением точки А без учета коЯ тактных деформаций Соответственно при этом же значении Я nepei щение точки А минимально.
.6x10 \
J.022 х10
Рис.5.7. Зависимости перемещения точки А с учетом контактных деформаций
, без учета контактных деформаций и контактных деформаций вставки рычага и наконечника от параметра Я (перемещения и деформации в метрах)
i о raquo;) ТГГн)
Л15 .. Н
Рис. 5.8. Зависимости перемещений точки О с учетом контактных деформаций 4 и без учета контактных деформаций от параметра Я (перемещения в метрах)
Рассматривая перемещение точки О во всем диапазоне О lt; Я lt; 1, можно Сделать вывод, что при относительно тонком втором участке (Я lt; 0,15) работа
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 [ 17 ] 18 19 20 21 22 23 24 25 26 |




