 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Мехатроника и робототехнология
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 [ 18 ] 19 20 21 22 23 24 25 26
упругой системы абсолютно неэффективна, т.к. перемепдение li, отрицательно. Физический смысл этого явления состоит в том, что при движении вверх торца пьезопривода под действием напряжения U точка О, где приложена внешняя нагрузка F, движется вниз из-за высокой податливости упругого шарнира.
Максимум перемепдение точки О (4 = 7,6 м) достигается при Я = 0,3. Здесь можно также сделать вывод, что сама внешняя нагрузка F также существенно влияет на коэффициент мультиплекции к, при ее увеличении работа системы также может оказаться неэффективной.
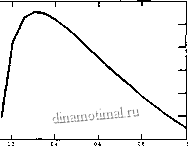
Поведение действительного коэффициента мультиплекции аналогично функции diH). Его максимальное значение ( = 8,0) достигается при Я = 0,3. Очевидным является то, что идеальный коэффициент мультиплекции постоянен во всем диапазоне изменения Я, fe =10,6. Коэффициент эффективности достигает максимума (. = 0,75) при Я = 0,3.
,.10.6 J
к о(Н)
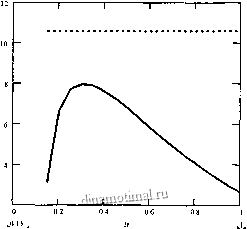
Рис. 5.9. Зависимости действительного коэффитщента мультиплекции од и идеального коэффициента мультиплекции к от параметра Я
..0.15 ., Н
Рис. 5.10. Зависимость коэффициента эффективности мультиплекции К от параметра Я
Подведем итог исследования мультиплексной системы с упругим шартш-ром. На действительный коэффициент мультиплекции оказывают существенное влияние следующие параметры.
1. Расстоятше между точками приложения нагрузки и толкателя пьезопривода. Существует максимальное значение коэффитщента мультиплекции при приложении толкателя вблизи упругого шарнира.
2. Жесткость сечения рычага, в том числе модуль упругости рычага (желательно выполнить его из стали, а не из дюралюминия).
3. Контактные деформатщи толкателя и вставки рычага (желательно выполнить их из вольфрама или подобных материалов, модуль утфугости которых существенно выше, чем у стали).
4. Сдвиговые деформации рычага и упругого шарнира, которые необходимо учитывать при расчетах.
5. Внешняя нагрузка, при ее повышении происходит снижение перемещения и коэффициента мультиплекции.
Существует оптимальное соотношение между толщинами упругого шарни-Ра и рычага, при котором коэффщиент мультихшекции максимален. При ма- ibix значениях коэффициента Я работа устройства становится неэффективной.
5.4. ТРУБЧАТЫЙ ПЬЕЗОПРИВОД
Рассмотрим трубчатый пьезопривод (рис. 5.11), у которого его длина Ьр во много раз больше остальных размеров. Пусть один торец его закреплен, а ко второму приложена внешняя сила Р. Определим перемещение этого торца при подаче электрического напряжения U на электроды, расположенные на образующих поверхностях пьезокерамической трубки.
и и и и Г/ и , Л
Рис.5. Расчетная схема трубчатого пьезопривода
В уравнениях обратного пьезоэффекта (5.2) при указанных допущениях механические напряжения T.J.\,T,T,Tf=0, т.к. в этих направлениях не действуют внешние силы. Относительные деформации S.,S.,S,S,S =0, т.к. толщина трубки hp laquo; Ьр. Учитывая это, уравнение обратного пьезоэффекта будет иметь вид
5,=.,1г,+ад. (5.22)
Механическое напряжение вдоль оси трубки
4dI-dI)
где площадь поперечного сечения трубки Q, - -i--. Знак laquo;- raquo; в
жении свидетельствует о том, что внешняя сила создает сжимающие механй ческие напряжения в трубке.
Напряженность электрического поля при подаче напряжения U
где толщина трубки hp = . Принимая во внимание то, что относитель-
ная деформация S, = -, и учитывая выше полученные выражения, найдем
перемещение торца трубчатого пьезопреобразователя
(5.23)
Очевидно, что перемещение растет пропорционально прикладываемому электрическому напряжению и уменьшается пропорционально приложенной внешней силе. Максимальную силу пьезопривод развивает при зафиксированном рабочем торце, т.е. при = О:
р Ми
МаксЕмальное перемещение получается при Р = О:
Жесткость пьезопривода найдем из выражения:
с. =-
(5.24)
Максимальное механическое напряжение в пьезокерамике
.шах
Как видно из последней формулы, жесткость привода зависит только от механических параметров. Сравнивая жесткости составного пьезопривода (5.10) При отсутствии стягивающей шпильки и трубчатого пьезопривода (5.24), можно сделать вывод, что формулы идентичны. Отличие состоит только в посто-
янных податливости пьезокерамики s и s вследствие анизотропии пьезоэлектрической среды.
Расчеты показали, что для трубчатого пьезопреобразователя со следующими параметрами:Ьр= 5,6-10% Д =l,0-10 .w, =0.9-10 =0.5-1(Гм, м, s = l,4 lO-\uH, с/з,=1,5-10- gt;Л7Г (для пьезокерамики марки ЦТС 19), Р = 100 Н, при подаче напряжения U = 300 В перемещение торца пьезопреобразователя = -2,7-10м - оно отрицательно, т.е. пьезопреобразователь сократился под действием внешней силы. При ее отсутствии максимачъное перемещение =5,0ЛОм, а при зафиксированном торце максимальная сила преобразоватечя Р = 96Н, жесткость привода с =1,9-Kf Н/м. Максимальное .механическое напряжение Т =6,4-10 Па.
В рассмотренном примере материал пьезокерамики, длина трубчатого преобразователя Lp, толщина трубки hp, напряжение U и внешняя сила Р выбраны такими же, как в хфимере составного пьезопривода. Сравнивая полученные результаты расчетов можно указать следующее. При отсутствии внешней силы перемещения рабочего торца в обоих случаях близки. Жесткость составного преобразователя на порядок выше, чем жесткость трубчатого, поэтому при воздействии силой Р = 100 Н в случае составного преобразователя перемещение уменьшилось только на 6% относительно перемещения без нагрузки, а у трубчатого - перемещение отрицательное, т.е. его длина сократилась. Таким образом, трубчатый привод не может работать при такой нагрузке.
В заключение отметим, что для каждого конкретного случая численных значений заданных параметров необходимо решать приведенные выше уравнения и находшь оптимальные значения параметров. По этой причине численно-аналитический метод, приведенный выше, является эффективным средством для нахождения параметров системы, необходимых для проектирования СМП
Глава 6. РАСЧЕТЫ ДЛЯ ПРОЕКТИРОВАНИЯ МОДУЛЕЙ С БИМОРФНЫМИ ПЬЕЗОПРИВОДАМИ
6.1. РАСПРЕДЕЛЕНИЕ ДЕФОРМАЦИЙ И МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ В ПОПЕРЕЧНОМ СЕЧЕНИИ БПП
При проектировании модулей микроперемещений с БПП важно знать характер распределения деформаций и напряжений по поперечному сечению БПП. Эта информация позволяет выбрать конструктивные параметры элементов в зависимости от технических требований, предъявляемых к устройству.
Рассмотрим БПП, состоящий из склеенных двух длинных и узких пьезокерамических пластин (ПКП) с металлической рессорой между ними (рис. 6.1). Пусть длина БПП намного больше поперечных размеров (/ raquo;й,/г /г). При подаче электрического напряжения на электроды пьезокерамических пластин БПП изгибается. При этом в активных слоях (в пьезокерамических пластинах) и в пассивном слое (металлической рессоре) возникают изгибные деформации и напряжения в плоскости xz. Рассматриваемый БПП симметричен относительно оси х, поэтому нейтральная линия поперечного сечения при изгибе будет проходить через середину металлической рессоры.
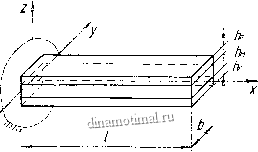
Рис. 6,1. Биморфный пьезопреобразователь.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 [ 18 ] 19 20 21 22 23 24 25 26 |




