 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Мехатроника и робототехнология
1 [ 2 ] 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26
седлу клапана. Она перемещается вертикально в магнитном поле, возбуждаемом внешним электромагнитом. Этот клапан был разработан как регулятор расхода для использования в устройствах высокого вакуума [57]. Клапан управляется магнитным полем, при этом сигнал имеет прямоугольную форму и частоту от 0,1 Гц до 100 Гц, а величина расхода газа регулируется в диапазоне от 3x10 торр-литр/мин до 2,4x10 Чорр-литр/мин при давлении 4,6x10торр.
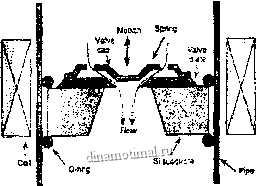
Рис. 1.3. Схема микроклапана, приводимого в действие электромагаитом
Микроклапан может быть установлен внутри маленькой трубки с внешней катушкой, находящейся вне трубки.
Микроклапаны могут также приводиться в действие комбинацией электро-маггапных и электростатических сил. Примерная структура показана на рис. 1.4. Ток, протекающий по мембране, перпендикулярной магнитному полю, вызывает перемещение (открытие отверстия), определяемое силой Лоренца. Для удержания клапана в закрытом состоянии при помощи электростатических сил, при противодействии определённого давления газа, напряжение подается между мембраной и противоположным электродом. Для электромагнитного и электростатического привода обычно используются импульсы тока величиной 200 мА при напряжении 30 В. Время срабатываши - менее 0,4 мс [52].
тяг
patl
(nembrJiw
I -J
patt 2
Рис. 1.4. Схема микроклапана, управляемого комбинацией электромагнитных и электростатических сил
Магшпострикциошше преобразователи имеют лучшие показатели быстродействия, однако они нуждаются в питании относительно большими токами (1 -5 А), приводящими к омическому нагреву микросистемы, что в большинстве случаев нежелательно. Пьезоэлектрические и электрострикционные преобразователи имеют лучшее быстродействие: г -1 - 20 мс. В этих устройствах на быстродействие оказывает влияние относительно большая электрическая емкость соединенных параллельно пьезо- или электрострикционных элементов. Электрические токи в них на один - два порядка ниже, чем у электромагнитных приводов, поэтому тепловые деформации в них незначительны. По своим силовым характеристикам они опережают все остальные типы приводов. Их существенным недостатком является наличие гистерезиса зависимости напряжение - перемещение. Усилие, вызванное столбиком, состоящим из дисков пьезоэлектрика, может быть весьма большим, но ход при этом мал. Например, давление порядка 35 МПа при приложенном ншфяжении в 150 В было получено набором 64-х тонких пьезокерамических дисков с размером 1,4x3x9 мм. Этот столбик имеет время срабатывания около 0,1мс и максимальный ход около 0,8 мкм [59]. На рис. 1.5 показан пневматический микрораспределитель, в котором применяется такой составной пьезопреобразователь.
седлу клапана. Она перемещается вертикально в магнитном поле, возбуждаемом внешним электромагнитом. Этот клапан был разработан как регулятор расхода для использования в устройствах высокого вакуума [57]. Клапан управляется магнитным полем, при этом сигнал имеет прямоугольную форму и частоту от 0,1 Гц до 100 Гц, а величина расхода газа регулируется в диапазоне от 3x10торр-литр/мин до 2,4х10 торр-литр/мин при давлении 4,6x10 торр.
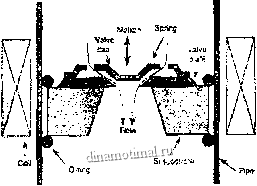
Рис. 1.3. Схема микроклапана, приводимого в действие электромагнитом
Микроклапан может быть установлен внутри маленькой трубки с внешней катушкой, находящейся вне трубки.
Микроклапаны могут также приводиться в действие комбинацией электромагнитных и электростатических сил. Примерная структура показана на рис 1.4. Ток, протекающий по мембране, перпендикулярной магнитному полю, вызывает перемещение (открытие отверстия), определяемое силой Лоренца. Для удержания клапана в закрытом состоянии при помощи электростатических сил, при противодействии определенного давления газа, напряжение подается между мембраной и противоположным электродом. Для электромагнитного и электростатического привода обычно используются импульсы тока величиной 200 мА при напряжении 30 В. Время срабатывания - менее 0,4 мс [52].
parti
dKnade i
pan 2
Рис. 1.4. Схема микроклапана, управляемого комбинацией электромагнитных и электростатических сил
Магнитострикционные преобразователи имеют лучшие показатели быстродействия, однако они нуждаются в питании относительно большими токами (1 -5 А), приводяищми к омическому нагреву микросистемы, что в большинсгве случаев нежелательно. Пьезоэлектрические и электрострикционные преобразователи имеют лучшее быстродействие: г = 1 - 20 мс. В этих устройствах на быстродействие оказывает влияние относительно большая электрическая емкость соединенных параллельно пьезо- или электрострикционных элементов. Электрические токи в них на один - два порядка ниже, чем у электромагнитных приводов, поэтому тепловые деформации в них незначительньт По своим силовым характеристикам они опережают все остальные типы приводов. Их существенным недостатко-м является наличие гистерезиса зависимости напряжение - перемещение Усилие, вызванное столбиком, состоящим из дисков пьезоэлектрика, может быть весьма большим, но ход при этом мал. Например, давление порядка 35 МПа при приложенном ншфяжении в 150 В было получено набором 64-х тонких пьезокерамических дисков с размером 1,4x3x9 мм. Этот столбик имеет время срабатывания около 0,1 мс и максимальный ход около 0,8 мкм [59]. На рис, 1.5 показан гшевматический микрораспределитель, в котором применяется такой составной пьезопреобразователь.
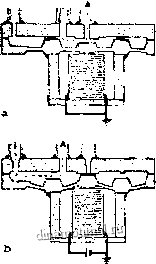
Рис, 1.5. Принцип действия трехходового микроклапана, управляемого столбиком пьезоэлектрических элементов; (а) открыто, (Ь) закрыто
Перспективно использование пьезоприводов для микронасосов. Периста;1ь-тическое движение пьезоэлектрических приводов используется в микронасосе, показанном на рис. 1.6. Он имеет три активных клапана. Нагнетание осуществляется, когда для получения перистальтического движения эти клапаны приводятся в действие при помощи пьезоэлектрических дисков, наклеенных на мембрану. Скорость нагнетания достигает 100 мл/мин при напряжении питания 80 В [55]. Напряжение обратной полярности используется для удержания клапанов в закрытом состоянии в соответствующий период времени.
Микронасосы, в состав которых входят обратные клапаны, имеют существенный недостаток - ограничение по частоте из-за низкого быстродействия обратных клапанов. Пьезоэлектрический микронасос может быть сделан без обратных клапанов, но с использованием сопел или ограничителей, которые действуют тем же образом. Такой насос может работать на частотах в сотни герц.
Рис. 1.6, Схематическое изображение работы перистальтического трехклапанного микронасоса
Наилучшим быстродействием обладают микроприводы электростатического типа; т -10 - 10 мс, однако зависимость напряжение - перемещение является нелинейной функцией, а силовые характеристики их наихудшие из рассматриваемых приводов. Электростатический привод в его самом простом виде имеет подвижный шюский электрод и неподвижный электрод. Сила, развиваемая приводом, пропорциональна квадрату приложенного напряжения и обратно пропорциональна квадрату расстояния (зазора) между электродами. Например, с приложенным напряжением в 10 В и зазором 10 мкм (в зазоре - воздух) статическое давление имеег величину 4,4 Па. Если напряжение увеличивается до 100 В и зазор уменьшается до 5 мкм, то давление увеличивается в 400 раз. Микроклапан консольного типа, полученный микрообработкой поверхности кремния, показан на рис. 1.7 [64]. Сила, возникающая в этом клапане, мала при большом межэлектродном зазоре. Управляемый диапазон давлений также ограничен десятками килопаскалей. Здесь стоит отметить, что на этом же принципе основан привод микрозеркал в оптоволоконных переключателях.
| 1 [ 2 ] 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 |




