 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Мехатроника и робототехнология
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 [ 22 ] 23 24 25 26
Численное значение коэффициента жесткости консольной рессоры с БПП, имеющей те же характеристики, что и при расчете перемещений: с = 1,5-10 Н/м.
Для нахождения максимальной силы (блокирующей силы), которую развивает БПП (рис. 6.3) при заторможенном свободном конце, необходимо знать перемещение из (6.32) при подаче напряжения f7, т.е. при приложении к БПП эквивалентного момента. Тогда
Численное значение этой силы в рассматриваемом примере = 0,84 Я
6.4. АКТИВНЫЙ УПРУГИЙ ПАРАЛЛЕЛОГРАММ
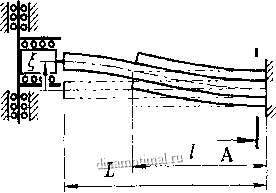
Рассмотрим параллельное соединение БПП 1 (рис. 6.10), позволяющее создать плоскопараллельное движение платформе 2. Как было сказано выше, действие такой упругой системы соответствует схеме активного упругого параллелограмма (АУП). Для расчета поступательного перемещения платформы под действием электрического напряжения U или под действием силы Р можно тфименить расчетную схему с одной рессорой (рис. 6.11). Причем внешняя сила, приходящаяся на одну рессору, - = где п - число рессор.
Приведенная упругая система является статически неопределимой, поэтому для расчета необходимо выбрать основную систему. Наиболее простой вариант - консольная составная балка с действующей на нее в точке О реакцией Pd от внешней силы и реактивным моментом от заделки в платформе .
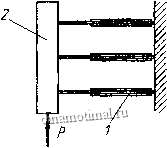
Рис. 6.10. Активный упругий параллелограмм
Силы реакции, направленной по оси х, не будет, т.к. в этом направлении внешние силы не действуют.
А, А-А
Рис. 6,11. Расчетная схема активного упругого параллелограмма
Воспользовавшись заменой напряжения эквивалентным моментом М, расчетную схему рессоры с БПП можно представить следующим образом (рис. 6.12).
Рис. 6.12. Расчетная схема рессоры активного упругого параллелограмма
Очевидно, что при указанных на схеме направлениях внешней силы приведенной к одной рессоре = Р/и, и эквивалентного момента перемещения, вызываемые этими воздействиями, будут направлены в противоположные стороны. Суммарное перемещение вдоль оси z
4=4p + 4ir, (6.40)
где 4р - перемещение от действия силы Р, - перемещение от действия эквивалентного момента . При указанном на схеме направлении суммарного перемещения направление действия момента реакции в заделке платформы будет направлено по часовой стрелке. Подчеркнем, что в правой части (6.40) отсутствует перемещение от действия М, т.к. он является реактивным моментом и его влияние на перемещение учитывается автоматически.
Чтобы определить , найдем угол поворота поперечного сечения рессоры в точке 0. Для этого в ней приложим единичный момент М = 1, направленный аналогично . Применив метод Мора, получим
о L-1
= -X,{L-lf-XM,{L-l)-X,[n-{L-I)]-l,{M,-M,)l.
Т.к. в заделке у платформы в точке О = О, то реактивный момент 136
2:Га(1-/,)ЧяЛ-ялм,
M = -2 L--
(6.42)
где А = Я-Яg,/j =/Д.
Для нахождения перемещения в точке О приложим в ней единичную силу Р = 1, действующую в том же направлении, что М. Применив метод Мора,
получим
4 = y(-l)x(Po;r+M )A,fl+J(-MPo+Mo-M)4A=-[A(Z-/)4V\
A(z-044l+4rz-(L-/r
Mo Г
2 L-- J 2 Учитывая формулу (6.42), найдем
4, = -Р
А(1-/,)ЧЯв
А(1-/,)ЧЯ
J 4 А/,-Я
(6.43)
В соответствии с (6.40) первый член выражения (6.43) соответствует перемещению от внешней силы
4р ~
А(1-/,)ЧЯ,
1 1
А(1-/,)ЧЯ,
J 4 А/,-Яд,
а второй - соответствует перемещению от действия эквивалентного момента
ИЛИ 4е=-V-
(6.44)
2 Я-М, 2 /, + Л(1-/,)
где Л = Яд/Яв . В этой формуле при / = 1, т.е. в случае, когда БПП занимает всю длину рессоры, получается, что = 0 (как и в случае =0). Следовательно, перемещения от действия электрического напряжения не будет. Это возникает из-за того, что приложено в точке О-в заделке рессоры в плат-
форме, поэтому угол поворота сечения = О не зависимо от величины М. Физический смысл этого вывода состоит в том, что рессора, как упругий элемент параллелограмма, при изгибе должна иметь точку перегиба. В нашем случае ( =1) при подаче напряжения БГШ не имеет точку перегиба, поэтому перемещение log = О.
Т.к. в формуле (6.44) о = 0 при 4= и при / = 0, то функция имеет максимум. Найдем его, решив квадратное уравнение, исходя из d
-4.(4) = О:
(Л-l)4-2Л/+Л = 0. Если Л 1, то на отрезке 0И lt;1 максимум 4. ) достигается при
а максимальное перемещение
2 (иЩ-
Если Л = 1, то максимум (/) достигается при 1 = 0.5, что очевидно и со-
ответствует простым логическим рассуждениям:
(6.45)
Коэффициент жесткости одной рессоры с БПП
г+О-/А [4+0-4)А
4(4/-4А)
В частном случае, когда L = l, т.е. при = 1, получаем
Коэффициент жесткости в этом случае в четыре раза выше, чем у консольной балки с теми же параметрами (6.39).
Коэффициент жесткости всего активного параллелограмма, состоящего из п параллельных рессор с БПП можно вычислить по формуле
4+(1-4)а
4+(1-4) А
4(4-4А)
(6.46)
Увеличивая число рессор в активном параллелограмме, мы пропорционально увеличиваем жесткость системы
Для активного параллелограмма, состоящего из двух рессор с БПП , которые имеют те же характеристики, что и рассчитанная консольная рессора с БПП, коэффициент жесткости имеет численное значение с = 9,0- Ю Я/л.
Таким образом, мы нашли перемещение платформы активного параллелограмма при одновременном действии внешней нагрузки и электрического напряжения, приложенного к БПП. Определили соотношение между длиной рессоры и БПП для получения максимального перемещения платформы. Выявили, что в случае, когда БПП занимает всю длину рессоры, то система становится неработоспособной.
Максимальную сршу (блокирующую силу), которую развивает такой пьезопривод, можно найти из (6.43) при (, = О:
244(1-4)4
Отах
21(4-А4)
А(1-4)+4
-I 4
А(1-4)+4
А4-4
[ из ВБфзжения
нашего примера численное значение силы =Ъ,А Н (для сравнения мак-нальная ста консольного БПП с теми же размерами Р = 0,84 Д).
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 [ 22 ] 23 24 25 26 |




