 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Мехатроника и робототехнология
1 2 3 [ 4 ] 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26
Глава 2. МИ№ОМАНИПУЛЯЦИОННЫЕ СИСТЕМЫ И ИХ g плоскости xz, - деформация сдвига в плоскости yz, u,v,w - переме-
ЭЛЕМЕНТЫ
щенйя по осям х,у,2. На практике достаточно просто осуществить перемещение какой-либо точки плоского упругого элемента по трем координатам. Таким образом, один такой управляемый упругий кинематический элемент может сообщить движение рабочему органу микроманипулятора по трем координатам. В этом состоит одно из отличий построения микроманипуляторов от манипуляторов относительно больших размеров.
Отметим такое отличие микроманипуляторов от манипуляторов, как малые зоны обслуживания: малые углы сервиса - не более 2 deg;-5 deg;, тогда, как у манипуляторов, работающих в цилиндрической системе координат, углы сервиса достигают 180 deg; и более градусов. Ход руки манипулятора может достигать 80% от минимального размера руки (во втянутом положении), а у мшфоманипулято-ров с.гидропередачей - не более 20%. Поэтому одно из основных направлений развития ММС состоит в увеличении зон обслуживания и, в частности, углов сервиса. Хотя стоит сказать, что при использовании МЭМС в качеспве выходных звеньев углы поворота рычагов микросхватов могут быть такими же, как у манипуляторов.
Следующее отличие микроманипуляторов состоит в том, что динамические нагрузки оказывают на порядок меньшее влияние на их работу, чем у laquo;обыч-
2.1. ОТЛИЧИЯ ММС ОТ МАНИПУЛЯТОРОВ ТОЧНОГО МАШИНОСТРОЕНИЯ
Микроманипуляционные системы (микроманипуляторы) предназначень для захвата, удержания, перемещения микрообъектов, а также для совершена различных операций над ними при помощи миниатюрных рабочих органов Как и манипуляционные системы относительно больших размеров (промыш ленные манипуляторы), ММС имеют неподвижное основание, модули пере мещений и рабочие органы. Манипуляторы при свободном перемещении ра бочего органа представляют собой пространственный механизм с разомкнуто кинематической цепью, причем его звенья связаны кинематическими парами i приводами, имеющими по одной степени подвижности (вращательная или по ступательная) [5]. Для микроманипуляторов этот принцип не всегда выполш ется. Перемещения их рабочих органов в оперативной зоне достаточно мал1 (доли миллиметров), поэтому они могут быть осуществлены благодаря упру гим деформациям кинематических элементов микроманипулятора. Любой дос
таточно малый участок такого упругого элемента в принципе может имет
ных raquo; манипуляторов. Как правило, скорости перемещений рабочих органов шесть степеней свободы за счет шести компонент деформаций [18]: ,
ММС не превышают 1- 2 мм/с, а движущиеся массы не более 10 кг, поэтому
ди ди dv
- -; = + -; при разгоне и торможении динамические воздействия очень малы. Следова-
5v ди dw тельно, демпфирующие устройства, присущие манипуляторам, здесь не нуж-
р V =.4- Другое существенное отличие состоит в том, что при малых перемещениях
рабочих органов с высокой точностью (высокой степенью разрешения) тепло-
где - деформация бесконечно малого участка по оси х, - деформацв вые деформации элементов микроманипуляторов являются фактором, кото-бесконечно малого участка по оси у, - деформация бесконечно малого уча Рьш нельзя пренебрегать при проектировании. Температурные дрейфы осо-стка по оси z,y- деформация сдвига в плоскости ху,у- деформация сдв raquo; сказываются при работе микроманипуляторов совместно с микроскопа-26 27
ми, для которых необходимо хорошее освещение, приводящее к нагреву эле- итак, основные отличия ММС от манипуляторов точного машиностроения ментов ММС. состоят в следующем.
Оценим погрешность позиционирования микроманипулятора, длина звена . В ММС имеется возможность получения трех и более (до шести) степе-которого 1~5Л(Г м, коэффициент линейного расширения y0j. =1,М0 ней свободы на одном модуле микроманипулятора.
1/град.К (сталь). Изменение длины звена при нагреве на М = f К можно laquo; существенно меньшие углы сервиса, чем маюшуляторы.
м а 1 \т 1П-6 о - Относительно малые динамические нагрузки.
яаити по формуле А / = у raquo; / АГ = 0,55 10 м. Это значение систематической
- Для ММС температурные деформации имеют существенное значение.
- Защита от внешних вибраций имеет важнейшее значение для ММС.
- Как правило, обратная связь по положению рабочего органа ММС осуществляется по оптическому каналу.
2.2. СТРУКТУРА ММС
ошибки позиционирования сравнимо со степенью разрешения многих микроманипуляторов, предназначенных для биологических исследований.
Один из важных принципов проектирования ММС состоит в том, что в конструкциях нужно избегать биметаллических звеньев. Параллельно соединенные детали должны по возможности иметь близкие значения коэффитщен-тов линейного расширения, в противном случае происходит изгиб конструкции при нагреве. Желательно предусмотреть термокомпенсирующие звенья, Структура ММС имеет много общего со структурой манипуляторов. Если которые при том же нагреве, что и у основных звеньев микроманипулятора, рассматривать только ее исполнительный блок, то он построен также по прин-смещали бы рабочий орган в противоположную сторону. последовательной разомкнутой кинематической цепи, когда каждый мо-
Для микроманипуляторов в отличие от манипуляторов одна из главных yj обеспечивающий определенные степени подвижности, располагается на проблем - это защита от внешних вибраций. Вибрации зданий происходят в подвижной части предыдущего. На базовом модуле располагается последова-диапазоне частот от 10 до 100 Гц с максимумом амплитуды около 2 мкм на дно установленные модули перемещений. Если модули грубых перемеще-частотах 15 - 20 Гц, поэтому резонансная частота виброзашпты ММС должна ний не обеспечивают заданной точности манипулирования, то далее идут мо-быть не выше 2 - 5 Гц [8]. Благодаря малым размерам микроманипуляторов дули точных перемещений.
перспективными являются методы активной виброзащиты. Ддя рцмера рассмотрим ММС, предназначенную для манипулирования
Далее можно отметать, что, как правило, у микроманипуляторов обратная микрообъекгами общими габаритами 0,1x0,1 хО,1 мм. Управление произво-связь по положению рабочего органа осуществляется при помощи оптических дится оператором, осуществляющим перемещения рабочего органа посредст-средств с дальнейшей обработкой видеосигнала, поступающего, например с вом джойстика и имеющим монитор для наблюдения за объектом. Будем счи-двух миниатюрных видеокамер, расположенных во взаимно перпендикуляр- тать, что минимальный ход рабочего органа ММС, совершающий операции с ных плоскостях. Таким образом, координаты рабочего органа относительно этим объектом составляет 1% от его протяженности, т.е. 1 мкм. Соответствен-неподвижного основания определяются непосредственно без пересчета коор- но погрешность минимального шага будет -0,5 мкм. Скорость рабочего органа динат промежуточных звеньев ММС. при непосредственном манипулировании с объектом составляет от 1 мкм/с до
0,2 мм/с, при быстром перемещении вне оперативной зоны - от 1 мм/с до 10 28 29
мм/с. Такие параметры объектов и рабочих органов систем манипулировани соответствуют задачам биологических исследований на уровне клетки и кле точных структур, технологическим процессам сборки устройств электронно] техники и микромеханизмов. ММС обычно имеют несколько режимов рабоц [39].
1. Наладочный режим (режим проверки работоспособности всех модула ММС). Ручной режим.
2. Режим ускоренного подвода рабочего органа к объекту (режим грубы перемещений). Может быть ручной и автоматический.
3. Режим рабочий (режим точных перемещений). Может быть ручной и ав тематический.
Эти режимы могут быть воспроизведены ММС, имеющей двухуровневув структуру: нижний уровень - модуль настройки и верхний уровень - модуль обеспечивающий перемещение рабочего органа по всем координатам, как режиме грубых перемещений, так и режиме точных перемещений. Такое пс строение имеет ряд недостатков. При движении рабочего органа в режим
Рабочий опган ММС 10 (игла) закреплен в держателе 11, который в свою точных перемещении происходит движение всех элементов конструкции, гаиичап. upi lt;ш iviiv i ; м к к
ухудшает динамические характеристики ММС в целом. Кроме того, рабоча Р зафиксирован на платформе 12 модуля 7. Объект исследования 3 и ра-
зона манипулятора ограничена, т.к. такое схемное решение позволяет имет помещены при работе в прозрачную кювету 13, находящуюся
т laquo; п на предметном столике 14. Рабочая зона освещается источником света 15. Ви-
только 3-4 степени подвижности. В противном случае размеры конструкци (jnumi,iujm
Т1 л laquo; gt; raquo; зуальная информация о рабочей зоне через объектив 16 поступает, отражаясь
Значительно возрастают. В качестве примера рассмотрим ММС, оперирую laquo;ич-к сш. к i
щую с биообъектами (рис. 2.1). ММС имеег два блока 1 и 2. Блок 1 неподвв зеркала 17 на видеокамеру 18.
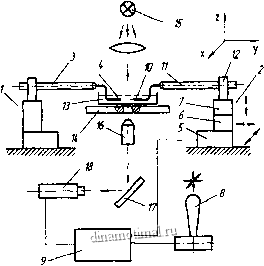
Рис. 2.1. Традиционная схема работы с микрообъектами
жен, в нем на держателе 3 закрепляется объект исследования 4 (например, пр
В последнее время получили наибольшее распространение ММС с гидрав-
ч г ~ , лическими ггоиводами [371 Конструктивно манипуляционный блок в такой
помощи вакуума). Манипуляционный блок 2 имеет три одинаковых модуля : илвидшчи j. j
6, 7, каждый из которых обеспечивает перемещение по одной координате, т.! ММС имеет три степени свободы x,y,z. Управление в ручном режим осуществляется при помощи джойстика 8 или микрометрических винтов (в схеме не показано), а также от компьютера 9 в автоматическом режиме.
системе (рис. 2.2) имеет основание в виде стойки 1, на которой установлен модуль 2 с одной степенью свободы[11]. На нем последовательно установлены аналогичные модули 3 и 4. Все три модуля имеют гидравлические приводы. Связанные через гибкие трубки с блоком управляющих гидроцилиндров 5, 6, 7, приводимых в движение либо вручную, либо при помощи шаговых электро-
| 1 2 3 [ 4 ] 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 |




