 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Мехатроника и робототехнология
1 2 3 4 5 6 [ 7 ] 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26
ции в еданый функциональный модуль приводной, информационной и упрамением миниатюрного зеркала, поэтому компактность системы высокая. Ин-ляющей составляющих электромеханической системы [23]. Такой ММ може})ормация о скоростях и ускорениях позволяет работать мехатронному ММ в состоять из следующих элементов. 1Инамйческом режиме с минимальными погрешностями, как по перемещени-
1. Микроэлектромеханический привод. так и по скоростям.
2. Упругие механические передачи. Пневматические датчики обычно не подходят для ММ, т.к. в большинсгве
3. Миниатюрные датчики обратной связи. случаев подача воздушной струи в рабочую зону недопустима, хотя точность
4. Первичные преобразователи электрических сигналов, снимаемых с датских датчиков достигает 0,1 - 0,5 мкм [49]. Электромеханические датчики, в чиков. шстности индукционные и емкостные, как правило, имеют худшие характери-
5. Интерфейсы и аналого-цифровые преобразователи. лики по точности чем пневматические.
Для манипуляционных систем целесообразно иметь обратную связь по еле Обратная связь по деформациям (и соответственно по механическим на-дующим параметрам: пряжениям) позволяет осуществить тактильное очувствление системы, т.е. оп-
по перемещениям рабочего органа (выходного звена), ределять следующие параметры процесса.
- по скоростям и ускорениям в характерных точках системы. 1- Момент времени, когда рабочий орган начинает взаимодействовать с
- по деформациям (что эквивалентно механическим напряжениям) i внешней средой, например, когда игла микроманипулятора начинает характерных точках системы, внедряться в исследуемый биоматериал.
2. Механические нагрузки на рабочий орган; сопротивление среды или 2.3. ДАТЧИКИ И ЧУВСТВИТЕЛЬНЫЕ ЭЛЕМЕНТЫ объекта, динамические нагрузки на рабочий орган во время разгона или
МЕХАТРОННЫХ МОДУЛЕЙ торможения при микроударе. Кроме того, в некоторых случаях может
наступить ситуация, в которой механические нагрузки будут превышать Обратная связь по перемещениям позволяет выйти рабочему органу (вы допустимый уровень. Поэтому эти датчики обеспечат информацшо о ходному звену) в определенную точку с минимальными погрешностями в ква предельных нагрузках
зистационарном режиме (т.е. когда динамические силы и моменты на порядо raquo; 3 информащш, поступающей с нескольких датчиков деформации мож-меш.ше, чем силы ш.езопривода) несмотря на наличие гистерезиса в ш gt;езощзе отклонениях щзостранственного положения элемента сис-
образователях. Чувствительные элементы, входящие в состав датчиков пере мы от определенного фиксировашюго положения, информация о ко-мещения, по принципу действия можно классифшщровать на оптические. тором находится в памяти микропроцессора.
элекгромехаш1ческие и пневматические [49]. Оптические системы обратно! Пьезоэлектрические преобразователи могут работать, используя как пря-связи (техническое зрение), используемые в ММС, позволяют производить омой, так и обратный пъезоэффекг. По этой причине пьезокерамическую пла-работку получаемой информации и определять текущие значения скоростей laquo; laquo;яинку, входящую в состав пьезопреобразователя, можно примеюггь в качест-ускорений выходного звена щзи постоянном моштгоринге. При этом на выхоДВе приводного элемента, а небольшую его часть - в качестве датчика дефор-ном звене обычно отсутствует какой-либо преобразующий элемент, за исклю
44 45
маций или ускорений. Такие датчики реагируют на переменное воздействц аналого-цифровые преобразователи 9 будет поступать в систему поэтому использование их в качестве чувствительного элемента квазистаци, удравления, которая в свою очередь выдаст сигналы на двухкоординатный парного процесса проблематично. Они имеют высокую чувствительное? gJдpoмaгнитный привод 6.
особенно тонкопленочные пьезоэлектрические датчики. В [14] описываете reg;
датчик, имеющий габариты 10x10x0,06 мм, диапазон измеряемых давлени от 1 Па до 8- Ю * Па, диапазон частот от 2 Гц до 2 - Ю Гц.
Более перспективно использование пьезорезистивных датчиков, основш ных на изменении электрического сопротивления при механической дефорхм; ции чувствительного слоя датчика. Такой слой, выполненный по технологи вакуумного напыления на изолированную подложку, имеет весьма малые п бариты: не более 1 х 1 х 0,02 мм, а чувствительность таких датчиков высока [47] описывается датчик, измеряюш11Й давление от 1 до 50 кПа, максимальнс напряжение на выходе датчика - 80 мВ, температурный коэффициент нест бильности - 0,02 %/К.
Такие датчики находят свое применение в конструкциях микроманипулятс ров. На рис.2.10 показано выходное звено 1 микроманипулятора, имеющг микропипетку 2, закрепленную в центре крестообразной кремниевой диафра мы 3 [22]. Качательное движение микропипетки 2 в двух направлениях х и j относительно корпуса 4, которая взаимодействует с объектом 5, осуществля
ется при помощи двухкоординатного электромагнитного привода 6. Переме гк было сказано выше, для надежной работы всего ММ в целом сигналы щение микропипетки 2 вдоль оси z осуществляется за счет перемещения кор qj датчиков обратной связи должны передаваться в двоичном коде. В соответ-пуса 4. Двухкоординатный датчик силы располагается на диафрагме 3, Он сс ствии с этим требованием структура мехатронного датчика может быть сле-стоит из 8 пьезорезистивных элементов 7, расположенных в местах креплени дующей (рис. 2.11). Внешнее механическое воздействие (сила, давление, де-перемычек 8 крестообразной диафрагмы 3 (в этих местах изгибные деформа формация) воздействует на чувствительный элемент, который преобразовыва-ции максимальны). Пьезорезистивные элементы 7 соединены электропрово ет его в электрический сигнал. Чувствительный элемент непосредственно свя-дяпщми дорожками с аналого-цифровыми преобразователями сигналов 9. Пр зан первичным аналоговым преобразователем, который усиливает электриче-отклонении микропипетки 2 от оси z пьезорезистивные элементы 7 будут ис ский сигнал до уровня, необходимого для нормальной работы аналого-пытывать различные деформации, в соответствии с которыми их омическ raquo; цифрового преобразователя. Оцифрованный электрический сигнал поступает сопротивления будут изменяться. Информация от пьезорезистивных элемея
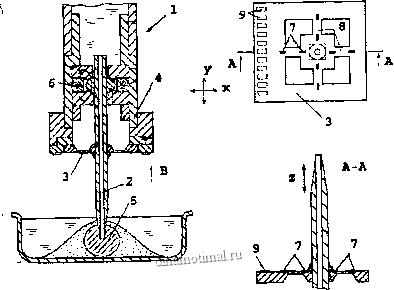
Рис. 2.10. Микроманипулятор с двухкоординатным датчиком силы
на выходной интерфейс, который накапливает и адахггирует цифровую инфор Глава 3. ПЬЕЗОЭЛЕКТРИЧЕСКИЕ МЕХАТРОННЫЕ МОДУЛИ МИК-
мацию для дальнейшей передачи его в систему управления. РОПЕРЕМЕЩЕНИЙ
Ввш laquo; laquo;неит laquo;1ое вомейетэие
Запросы от схсташ улрилеява
3.1. ПЬЕЗОЭЛЕКТРИЧЕСКИЕ ЭЛЕМЕНТЫ
ПервЕчвый алалоговкй 1феобр gt;зоштет
Аналого-цхфровоЗ преобризояатель
Входной ннтерфес
Ввпюднойинтерфейе
Пьезоэлектрические преобразователи, являющиеся основным элементом пьезопривода, основаны на действии пьезоэлектрического эффекта, открытого братьями Кюри в 1880 г. Прямой пьезоэффект - это образование электрических зарядов на поверхности тела при его механической деформации, Обрат-Ивформцм ли сииам yдpцJИiaи пьезоэффект - ЭТО образование деформации при наложении разности по-
, тенциалов на его поверхности. Пьезоэффект получил свое название от грече-
№с. 2.11. Структурная схема мехатронного датчика микроме-
ханического модуля
ского piezo - давлю. Этим свойством обладают некоторые кристаллы, которые относятся к типу сегнетоэлектриков (название происходит от наиболее
Q характерного кристалла этой группы - сегнетовой соли ЫаК4Н40б4Н20).
но время периодического опроса мехатрошп.1х датчюсов всей ММС запрос на о
ooiipuv, ш Различают два вида сегнетоэлектриков: монокристаллы и поляризованные
рассматриваемый датчик поступает на входной интерфейс, который открывает
поликристаллы. Первые - встречаются в природе (например, кварц) и выращи-
канал дтя получения информации от выходного интерфейса. Для уменьшения
г-т ваются искусственным путем, они имеют высокую стоимость и поэтому в про-
габаритов мехатронных модулей ММС сигналы от системы управлеюся и об-
J f 1л и uw мышленности используются редко. Вторые - пьезокерамические изделия полу-
ратно идут по одной шине.
чают промышленным путем и имеют в ультразвуковой технике наибольшее Оснащение ММС мехатронш,1ми датчиками позволяет вводить в систему я.
*л vnwibivi.v распространение. Большинство из них представляют собой химические соеди-
управления информацию о внешних воздействиях различной физической при- ения в виде солей свиша и бария: PbNb.O РЬТЮз-РЬ2тОз, ВаТЮз.
родьт В этом случае становится эффектившлми методы адаптивного управле- п .
/uioBiJc Пьезоэлектрическую керамику, подобно обычной керамике, изготавливают
ния и методы, основанные на нечеткой логшсе, для осуществлеш1я которых гпп
j-. ,кJLJы. горячим прессованием и литьем под давлением, поэтому форма пьезокерами-
исполъзуют щ5оцессоры с весовыми ассоциативными Щ)авш1ами [49 651 чес laquo; к -п
-J- ческих элементов может быть разнообразной. Для проявления пьезоэффекта
пьезокерамические элементы необходимо поляризовать (в отличие от моно-крисгаллических сегнетоэлектриков). Сначала поверхности пьезоэлемента (чаще всего параллельные) металлизируют серебром или медью методом вжи- ния или ультразвуковым лужением. Затем пьезоэлементы поляризуют в специальных ваннах, наполненных силиконовой жидкостью при температуре Юо - 130 deg; с . Поляризация заключается в том, что на электроды подают в те-
| 1 2 3 4 5 6 [ 7 ] 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 |




